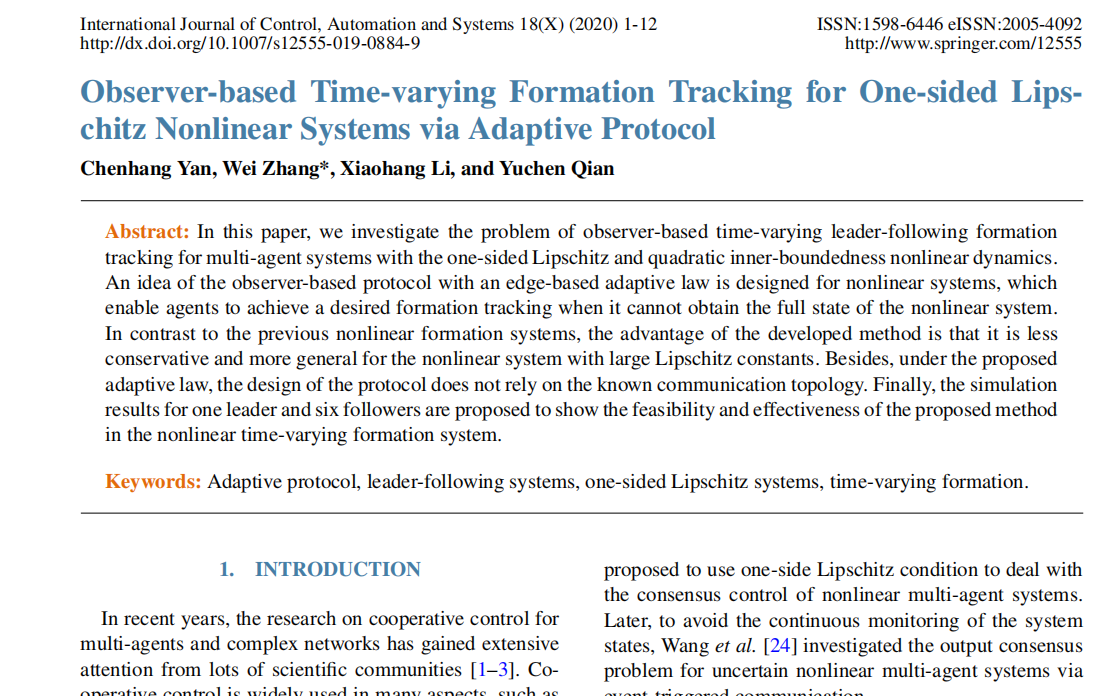
1、针对多智能体系统中的基于观测器的时变领导者跟随编队跟踪问题进行了研究。针对非线性系统设计了一种基于观测器的协议,其中包含基于边缘的自适应律,该协议使智能体能够在无法获取非线性系统完整状态的情况下实现期望的编队跟踪。
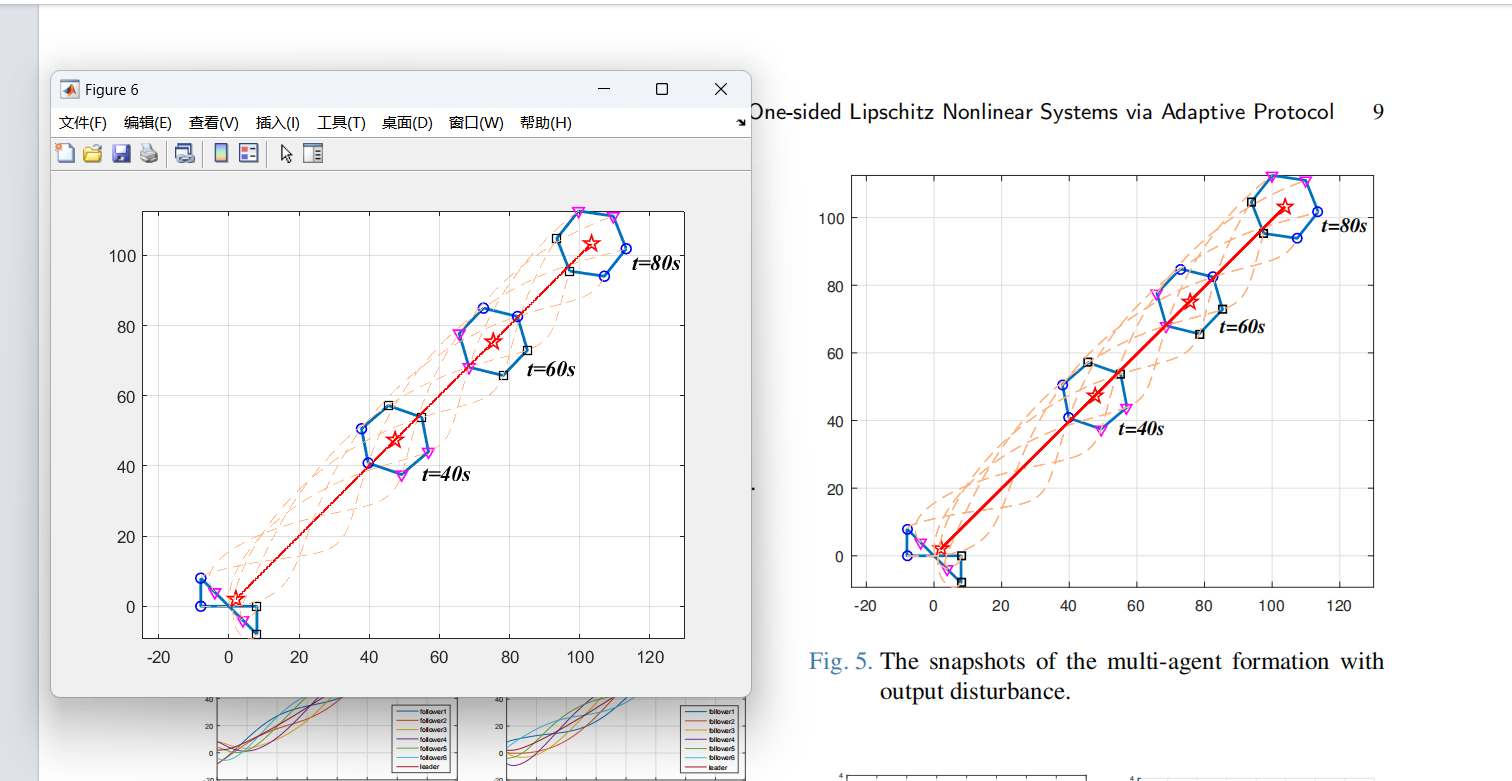
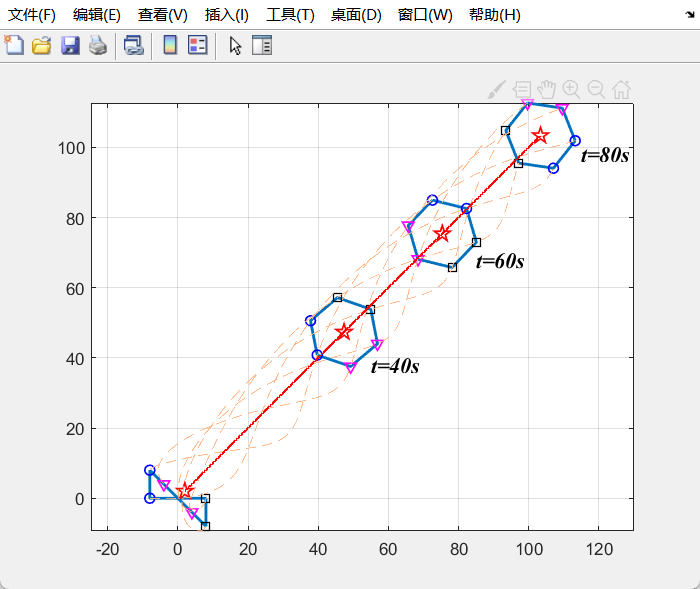
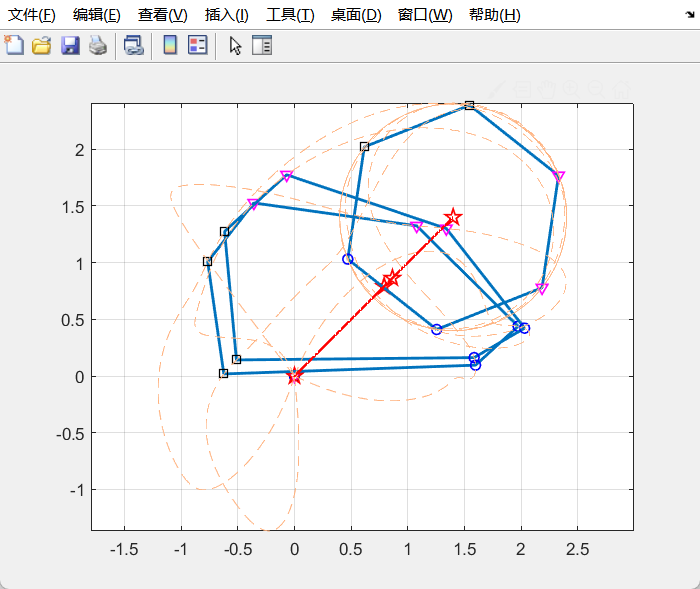
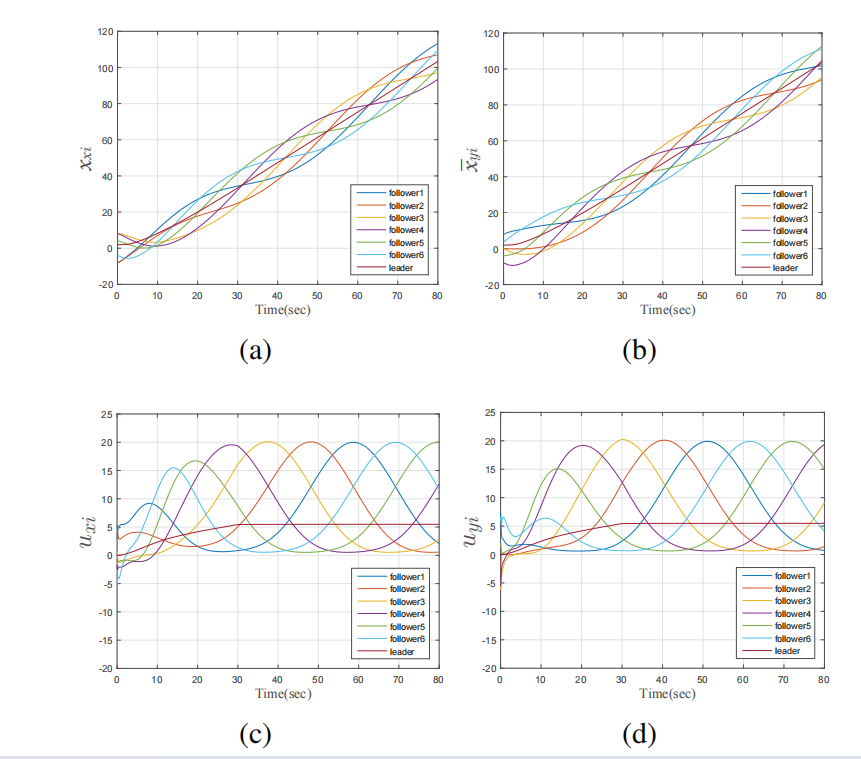
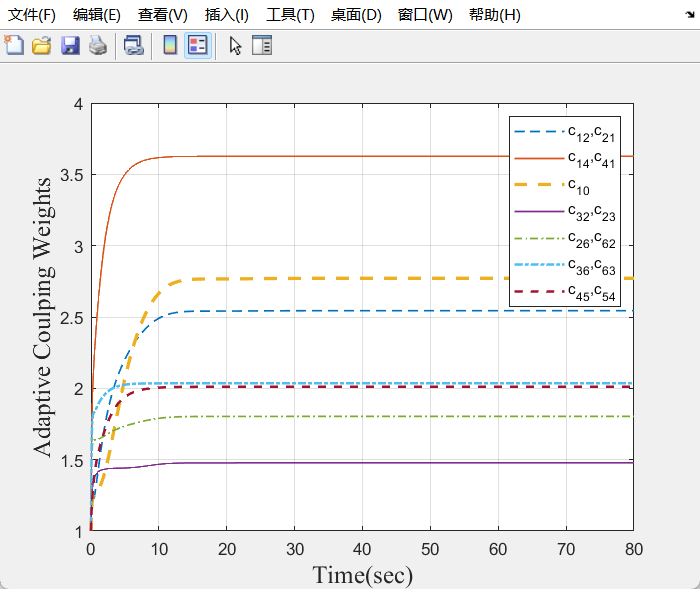
2、与之前的非线性编队系统相比,在采用的自适应律下,协议的设计不依赖于已知的通信拓扑结构。最后,给出了一个领导者和六个跟随者的仿真结果,以展示所提出方法在非线性时变编队系统中的可行性和有效性。
3、带有一篇英文参考文献结合仿真一起学习
参考文献:《Observer-based Time-varying Formation Tracking for One-sided Lipschitz Nonlinear Systems via Adaptive Protocol》

💰直接付款,即可下载完整资料!🔍资料内含文案描述的所有内容,就是这么全面!🔐请你看资料是否符合自己,确认再下单,因为资料是虚拟产品哦!🙋♀如果你遇到了任何下单或者运行报错问题,请随时联系我哦!联系方式V+:kyxlz589🙋♀🙋♀
B站UP主:科研助手小栗子