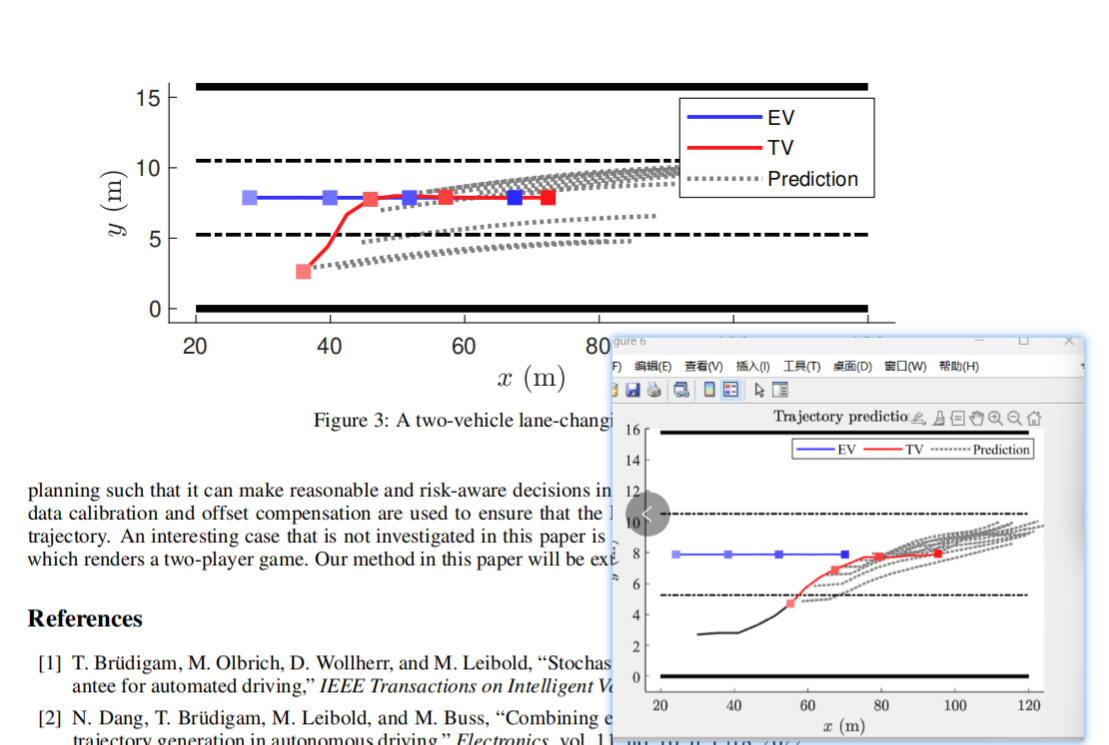
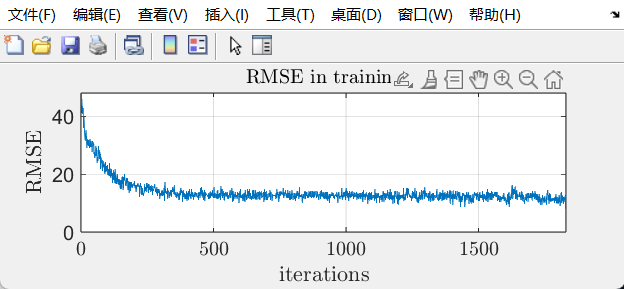
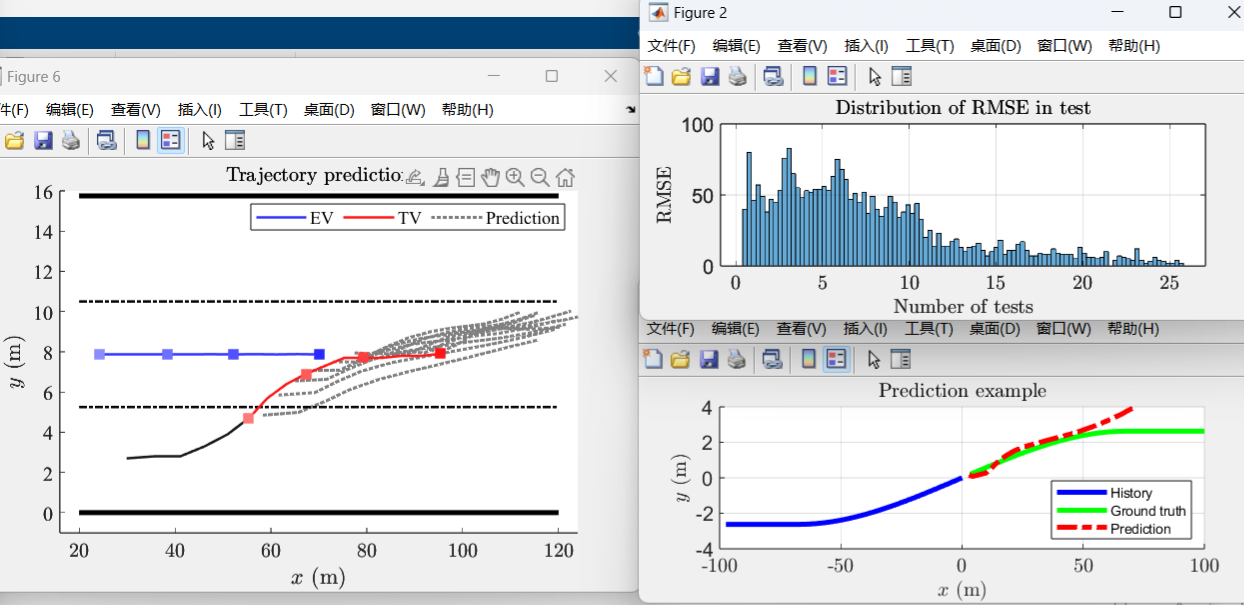
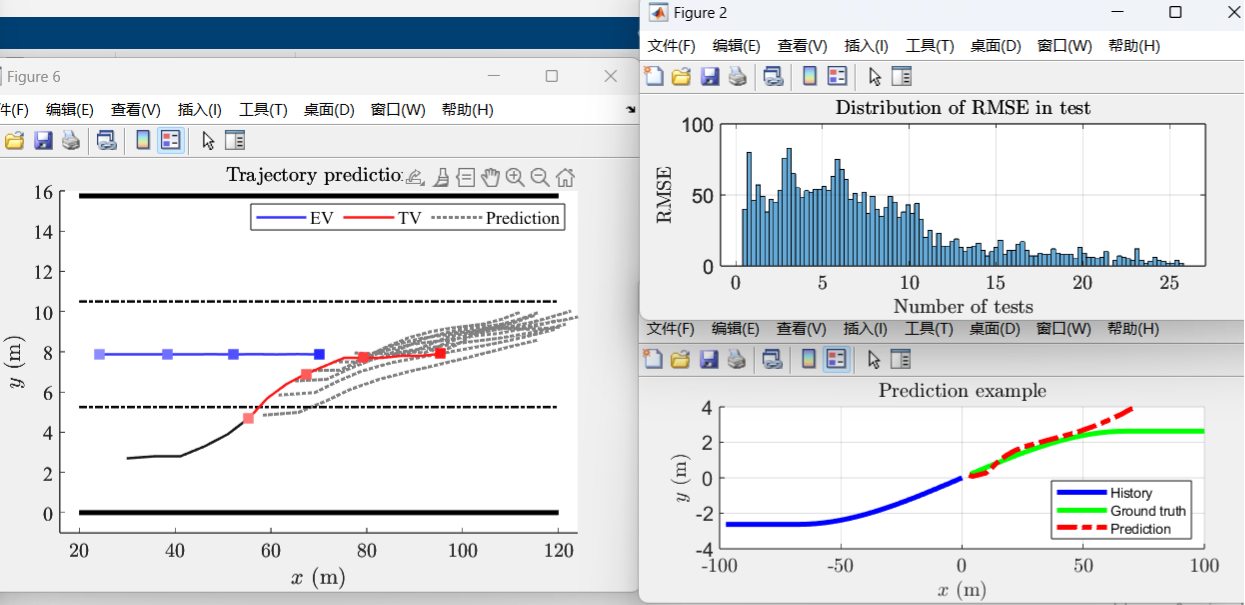
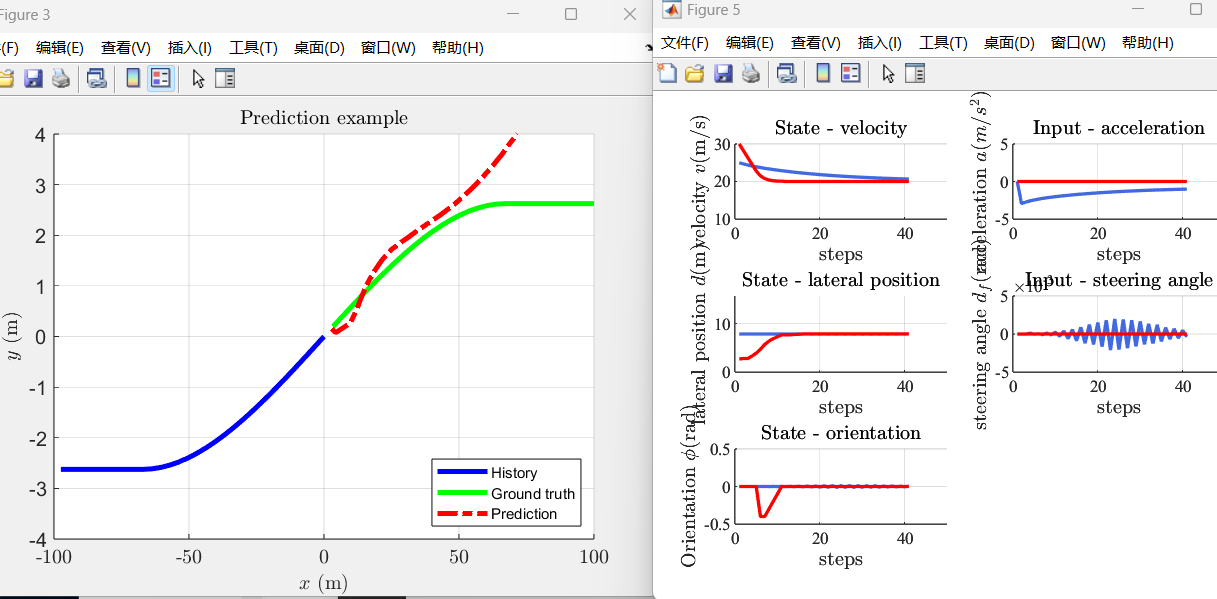
1、提出了一种新的基于mpc的自动驾驶汽车运动规划方法,该方法具有一组风险意识约束。这些约束结合了使用基于深度学习的方法学习的TV的预测轨迹。基于TV的历史数据,采用递归神经网络(RNN)预测其未来轨迹。然后,将预测的TV轨迹纳入自我车辆MPC的优化中,以产生无碰撞运动。通过仿真研究,验证了RNN模型的预测精度和MPC生成的无碰撞轨迹。
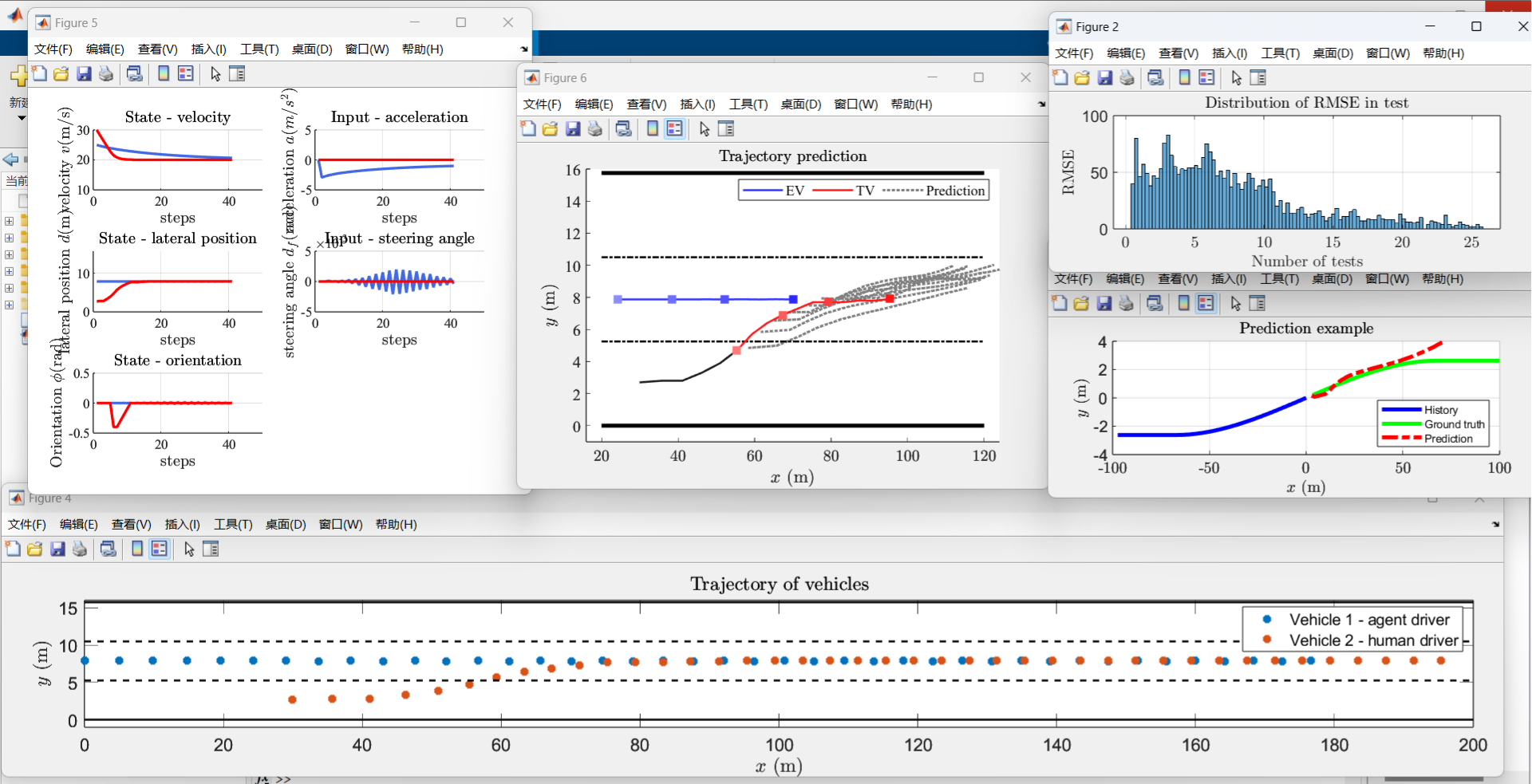
2、该模型为自动驾驶汽车模型预测控制,其中包括由递归神经网络预测的目标车辆轨迹算法。
3、训练具有长短期记忆 (LSTM) 单元的递归神经网络,以根据目标车辆的历史轨迹预测目标车辆的轨迹。然后,根据预测的轨迹,使用模型预测控制 (MPC) 来进行自我安全机动。
4、该模型演示考虑了一个高速公路场景,其中代理驾驶的自我车辆沿中央车道行驶,同时避免与从慢车道切入的人类驾驶目标车辆发生碰撞。
💰直接付款,即可下载完整资料!🔍资料内含文案描述的所有内容,就是这么全面!🔐请你看资料是否符合自己,确认再下单,因为资料是虚拟产品哦!🙋♀如果你遇到了任何下单或者运行报错问题,请随时联系我哦!联系方式V+:kyxlz589🙋♀🙋♀
B站UP主:科研助手小栗子