资料内容:C语言程序+参考英文说明文档
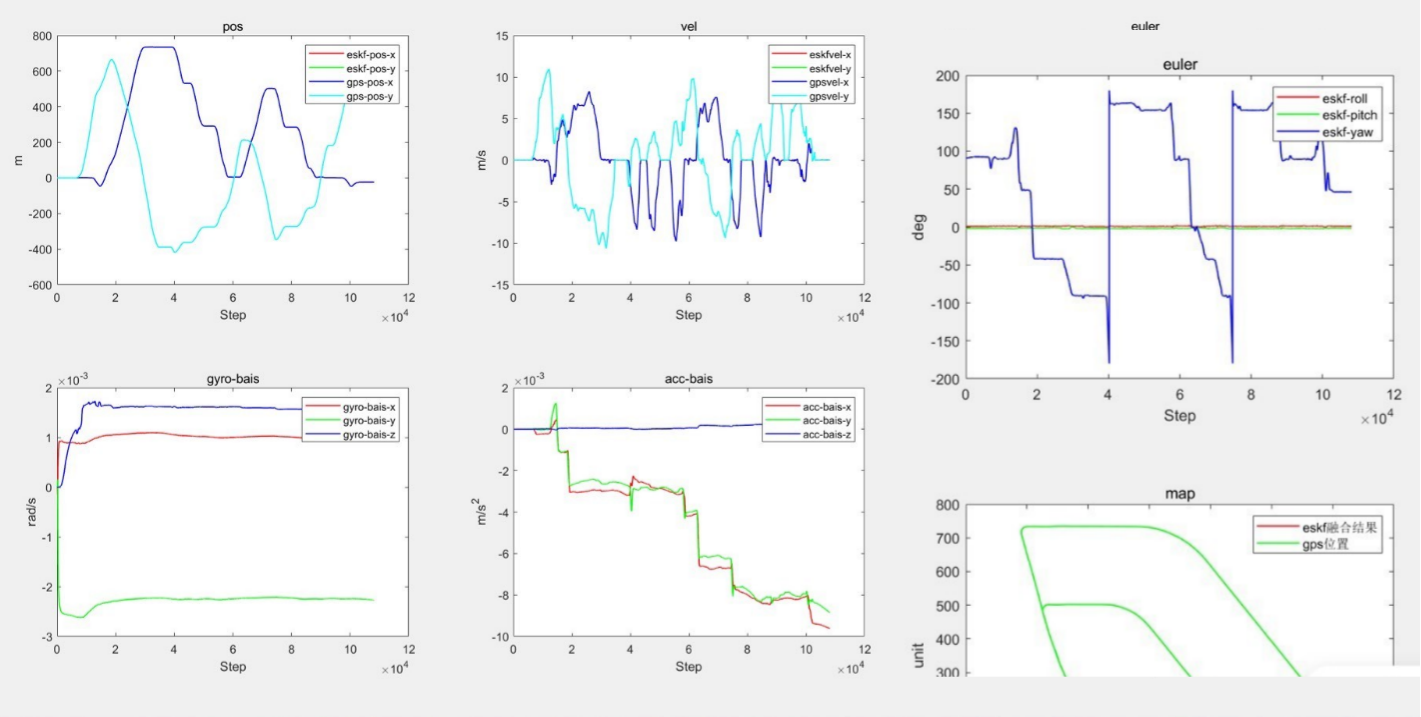
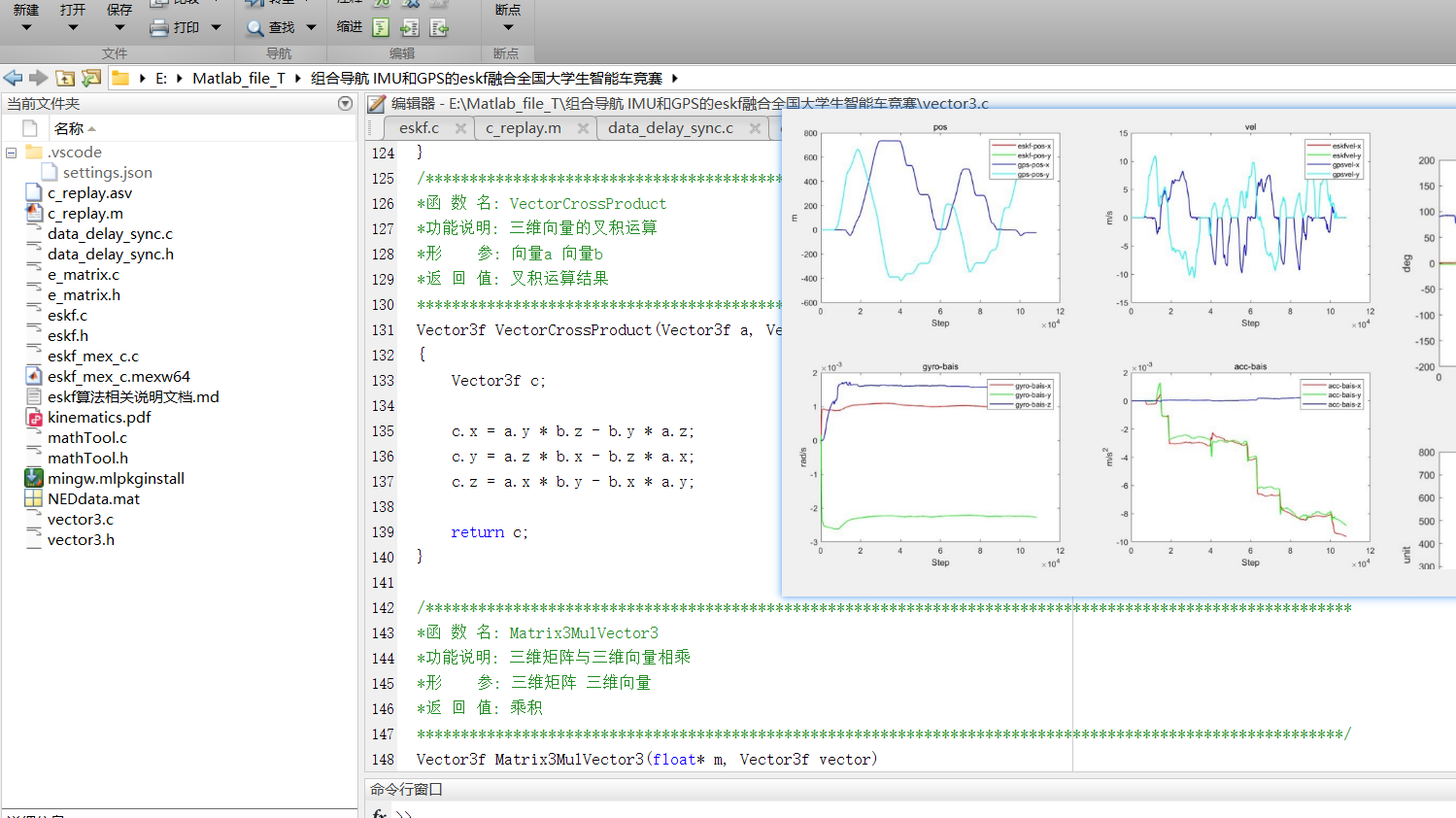
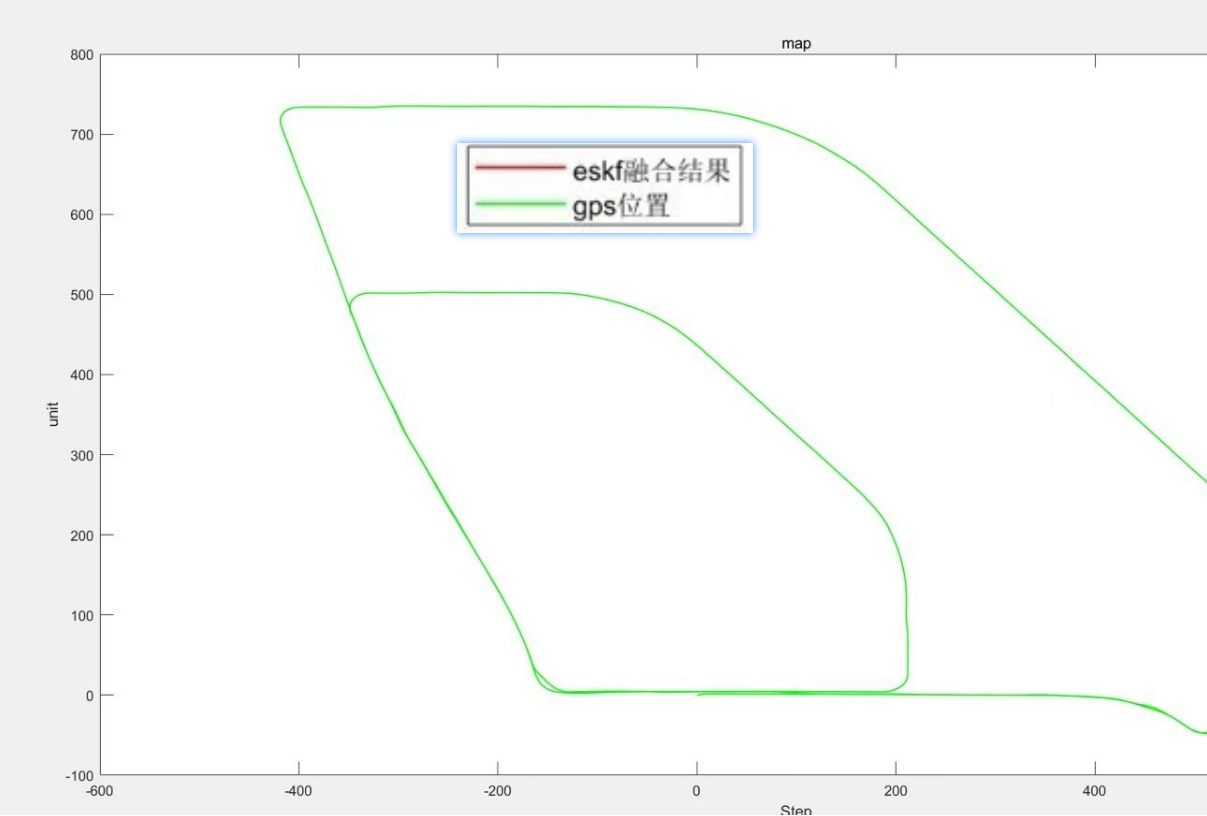
1、算法复现:该算法是根据kinematics.pdf的文章进行复现得到,详细的推导过程已经在pdf中详细说明,该算法使用C语言版本,方便在单片机上移植运行,整个代码结构清晰明了,不同模块有对应的注释,只需调整相应的噪声参数即可调试算法效果,并且包含了杆臂补偿,数据时间对齐等操作。
2、NEDdata数据使用了武汉大学GREAT实验室开源的数据,已将GPS数据与IMU数据进行插值补齐。
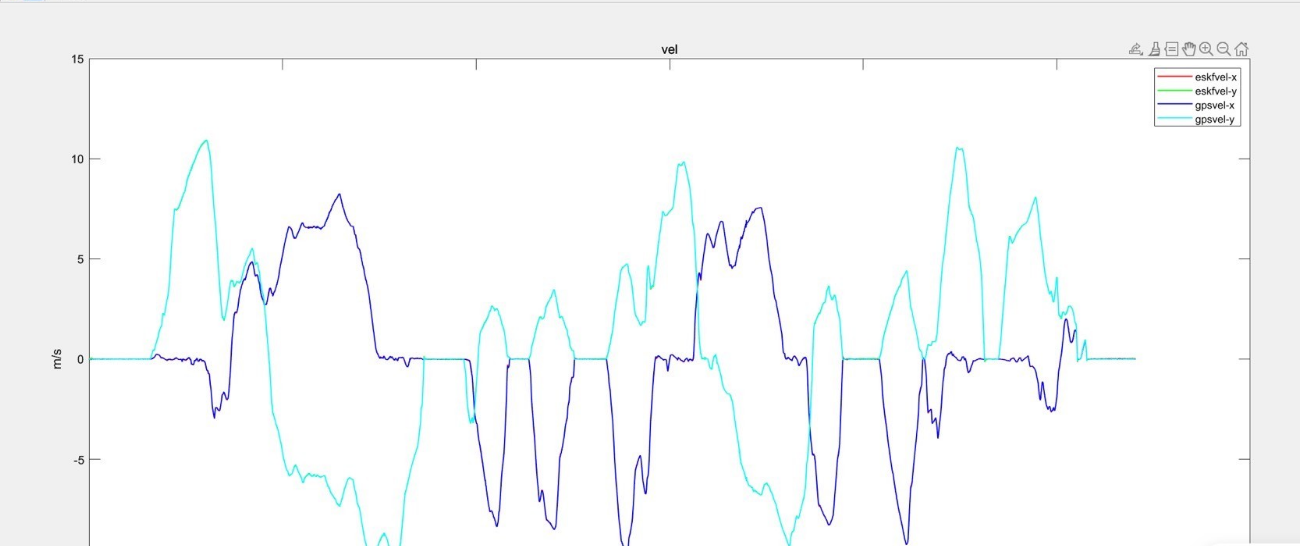
3、使用误差状态反馈卡尔曼eskf对imu与gps数据进行融合,集成算法相关库,方便移植至单片机上运行,可在matlab运行。
算法语言:C语言版本
算法仿真平台:matlab R2022b版本, 在matlab中使用mex进行离线仿真
数据更新频率: imu数据 [100hz] gps数据 [10hz]
💰直接付款,即可下载完整资料!🔍资料内含文案描述的所有内容,就是这么全面!🔐请你看资料是否符合自己,确认再下单,因为资料是虚拟产品哦!🙋♀如果你遇到了任何下单或者运行报错问题,请随时联系我哦!联系方式V+:kyxlz589🙋♀🙋♀
B站UP主:科研助手小栗子