基于强化学习+MPC模型智能车辆变道轨迹跟踪控制算法的设计,包含视频,文档,仿真文件,对比图等,效果优异适合新手学习使用。
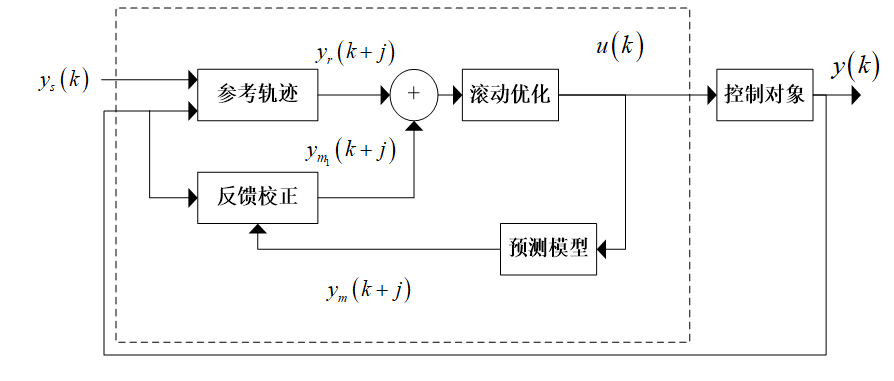
模型预测控制(MPC)从提出至今已有40余年。发展至今,MPC的原理趋于成熟,MPC的基本结构如图5.1所示。在MPC的结构中,滚动优化模块和预测模型模块为MPC的两个核心部分。
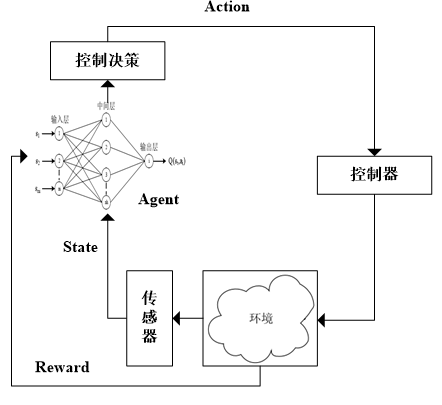
强化学习(Reinforcement Learning,RL)是目前AI研究的一个重要方向。强化学习算法的核心功能是通过与外部环境的交互学习,即根据环境的变化,不断的指导控制器做出最优的控制策略,使得整个系统实时的适应外部环境的变化,从而实现最佳控制效果。基于强化学习的控制器,其通过设计一个奖励函数对外部环境改变所做出的控制决策所对应的控制性能进行评价,使得系统的控制效果在当前环境状态下达到最大奖励,即最优控制效果。