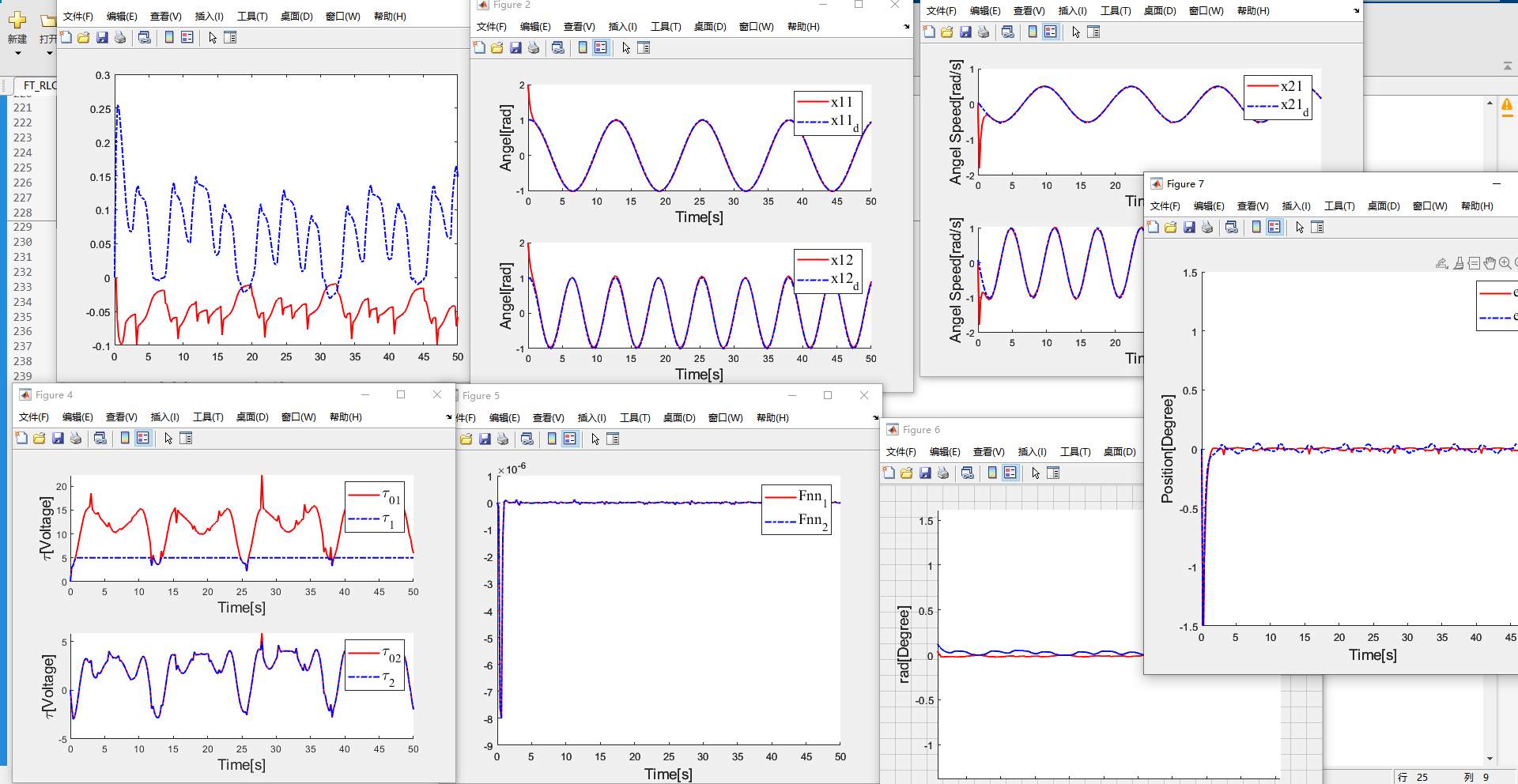
笔者复现了一区顶刊文:复现Reinforcement Learning-Based Fixed-TimeTrajectory Tracking Control for Uncertain Robotic Manipulators With Input Saturation(复现程度90%),关于自适应强化学习机械臂控制,涉及固定时间,滑膜,和输入饱和。代码框架方便易懂,适用于所有控制研究的家人们,有意者直接拍,自己编写的代码。
笔者复现了一区顶刊文:复现Reinforcement Learning-Based Fixed-TimeTrajectory Tracking Control for Uncertain Robotic Manipulators With Input Saturation(复现程度90%),关于自适应强化学习机械臂控制,涉及固定时间,滑膜,和输入饱和。代码框架方便易懂,适用于所有控制研究的家人们,有意者直接拍,自己编写的代码。