基于MPC模型预测的两轮差速移动机器人多种轨迹跟踪控制(带参考文献)
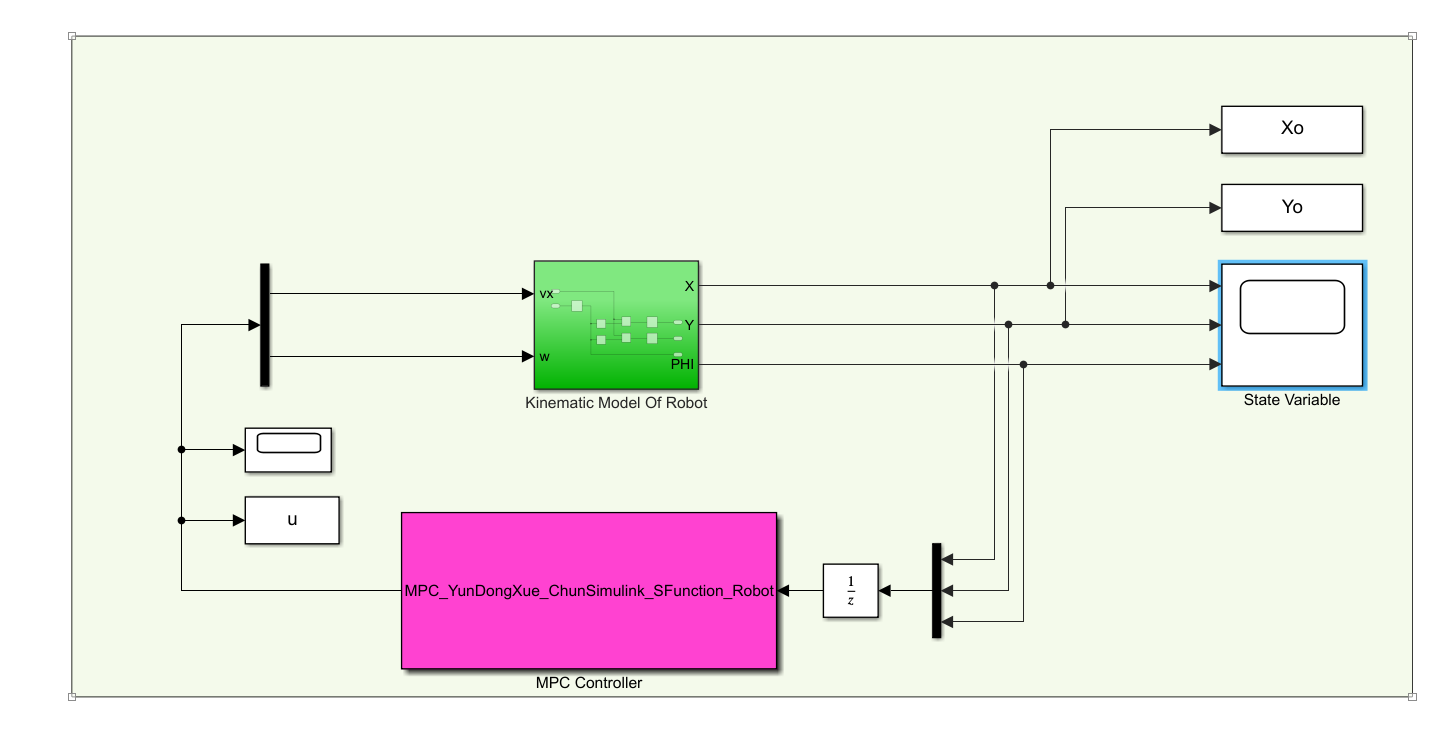
1、simulnk模型加matlab代码,无联合仿真,横纵向跟踪
2、可以实现车速的跟踪,又可以实现对路径的跟踪;
3、采用simulnk搭建模型主体,matlab代码搭建MPC控制器,无联合仿真
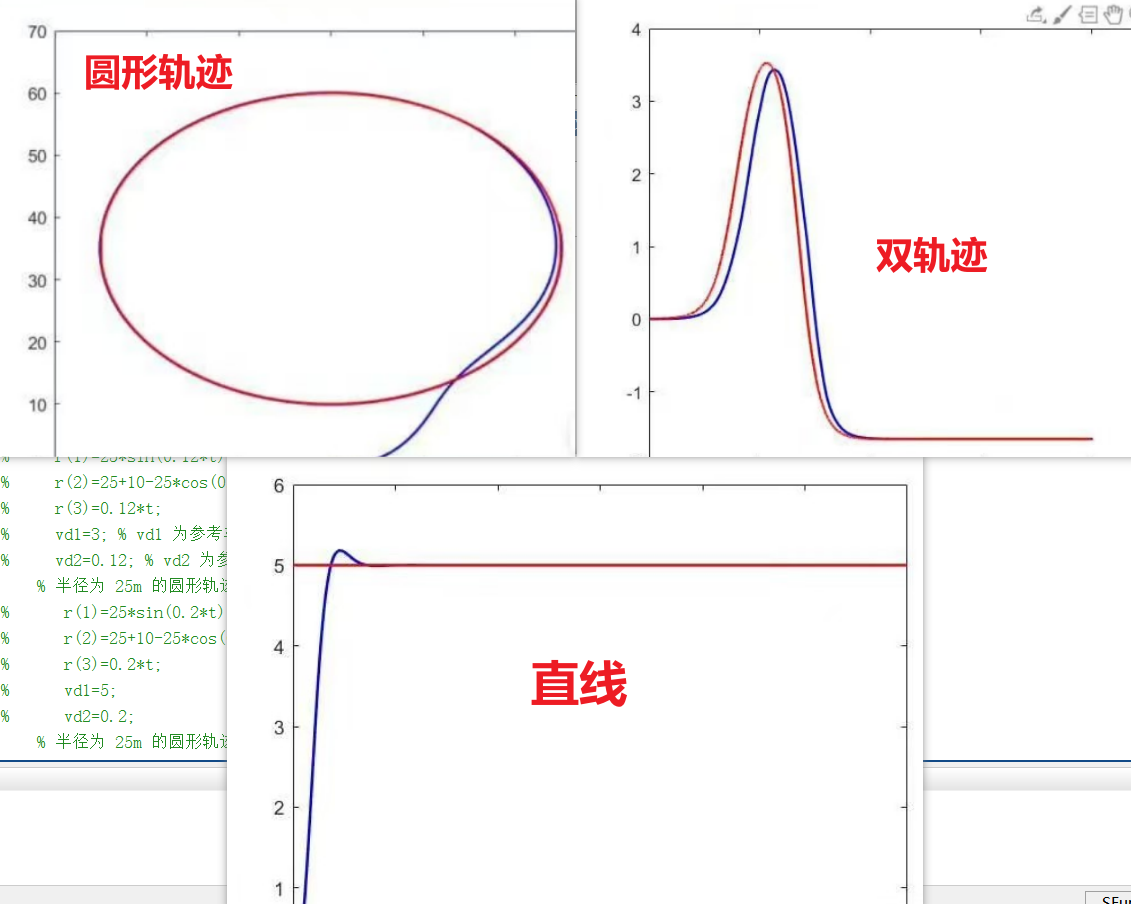
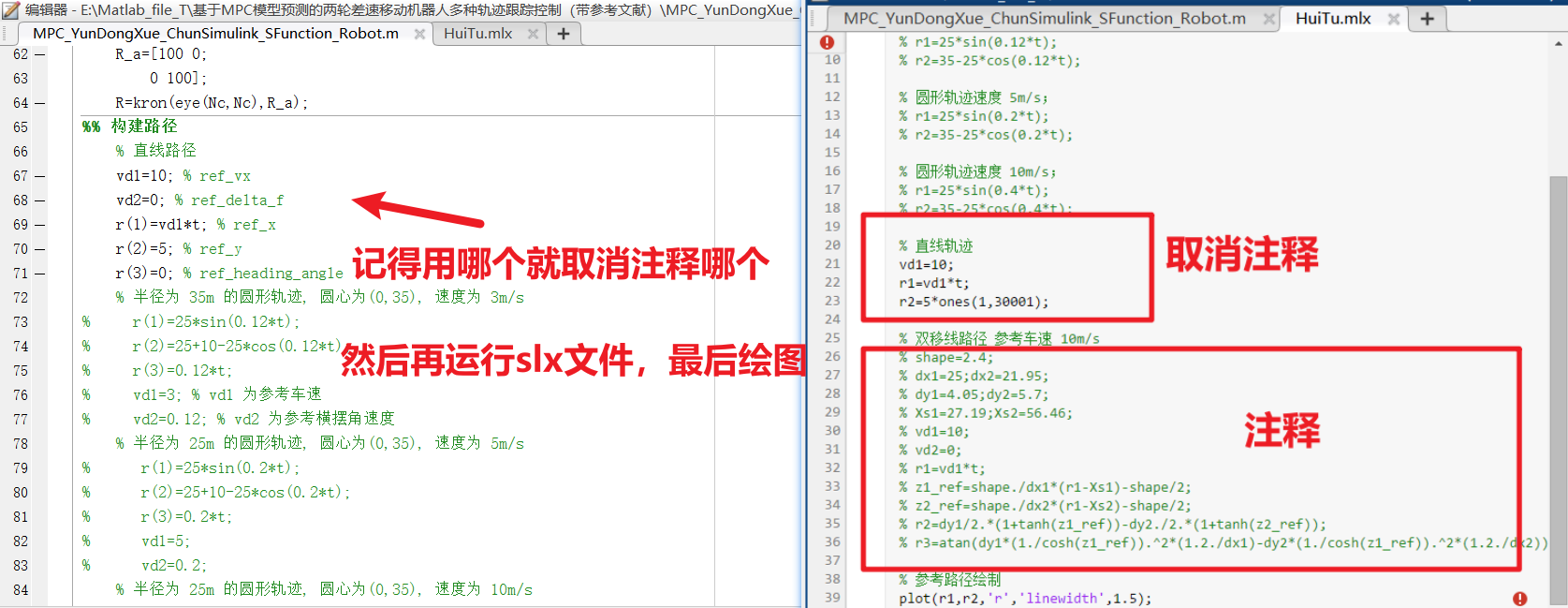
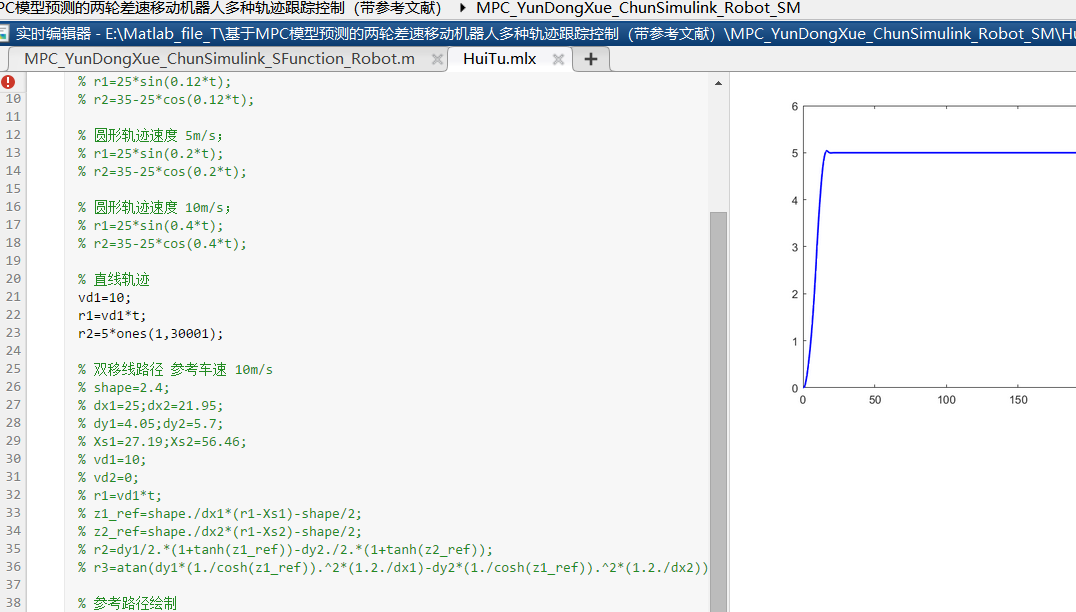
4、设置了5种轨迹,包括三种车速的圆形轨迹,单车速的直线轨迹,单车速的双移线轨迹
💰直接付款,即可下载完整资料!🔍资料内含文案描述的所有内容,就是这么全面!🔐请你看资料是否符合自己,确认再下单,因为资料是虚拟产品哦!🙋♀如果你遇到了任何下单或者运行报错问题,请随时联系我哦!主页简介有联系方式🙋♀🙋♀