详细介绍
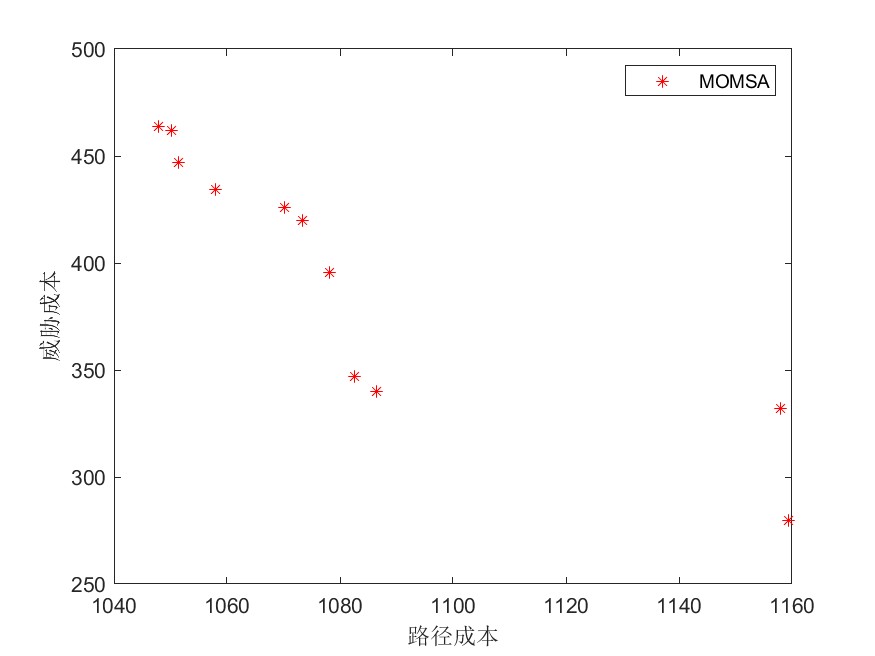
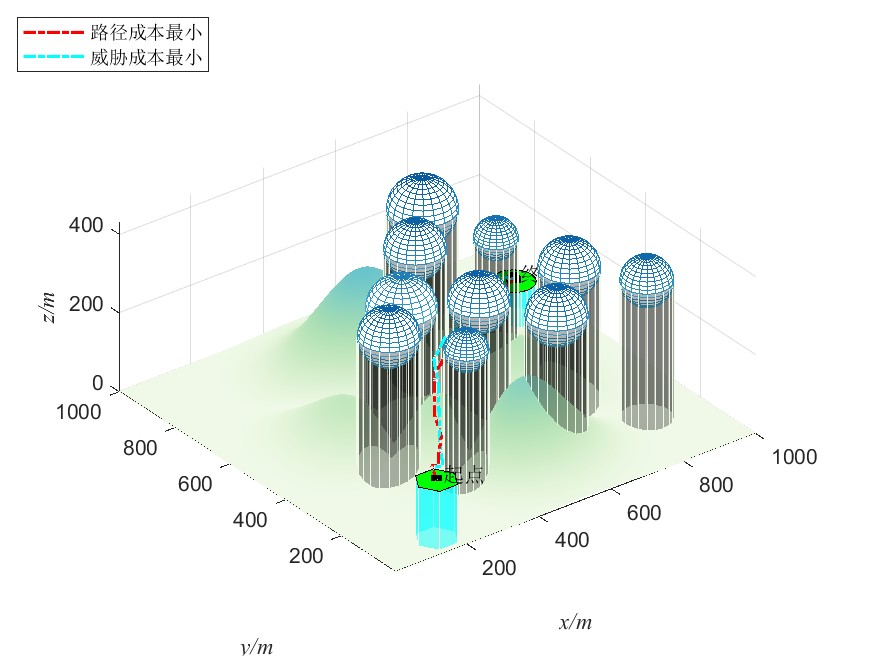
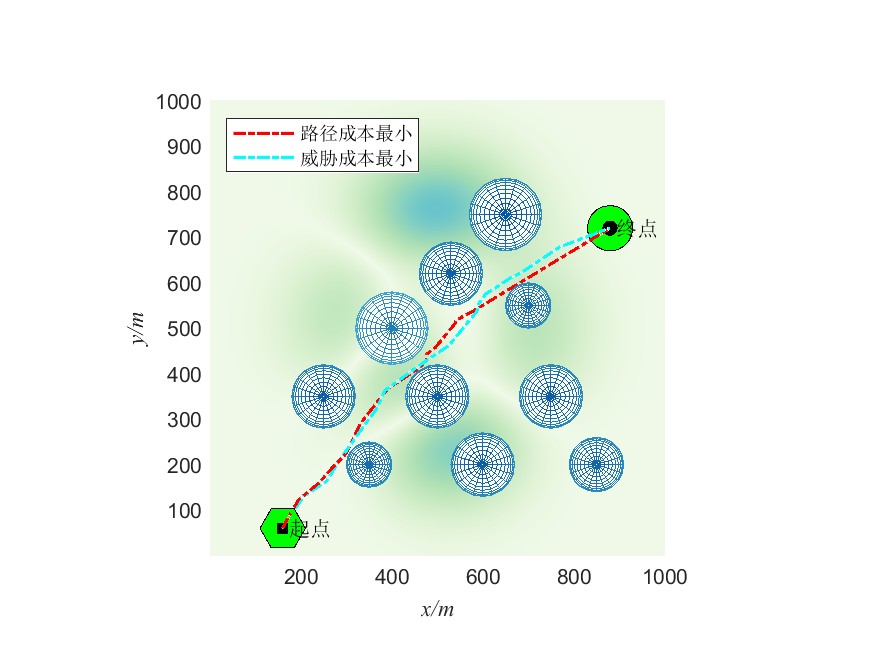
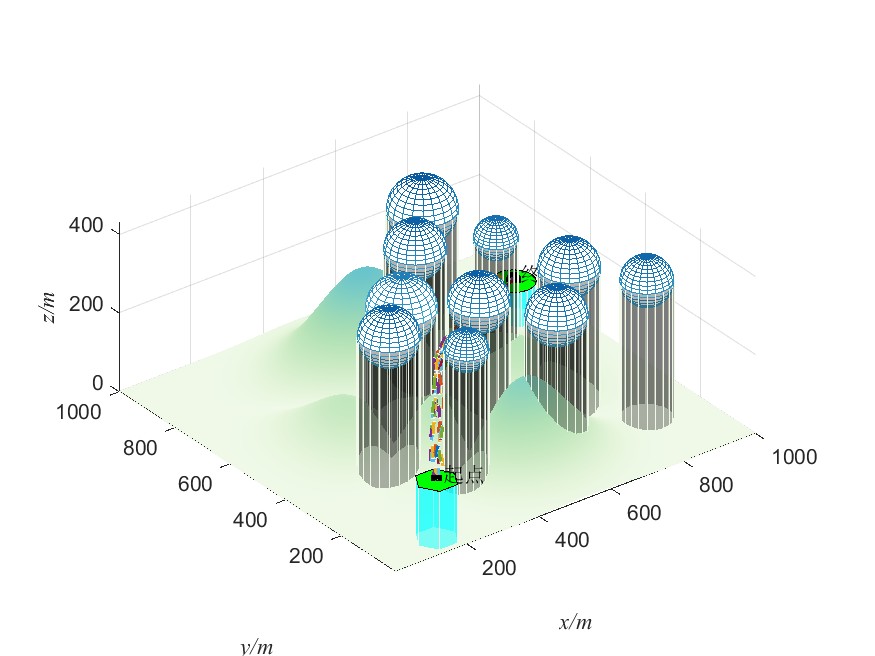
(一)多目标螳螂搜索算法(Multi-objective Mantis Search Algorithm ,MOMSA)求解无人机三维路径规划(MATLAB代码)-CSDN博客

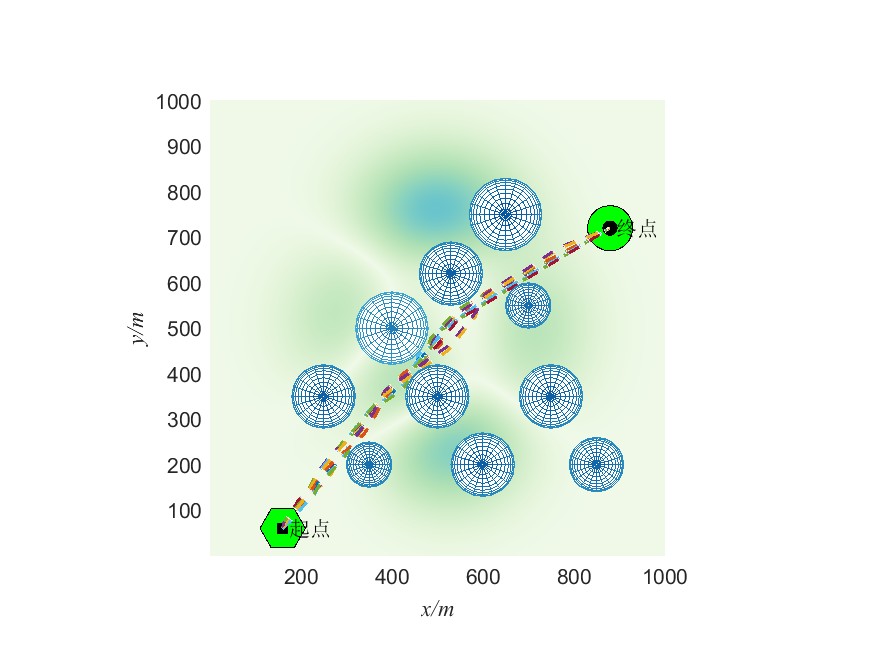
完整MATLAB代码
点击main.m即可运行,可以修改障碍物位置。
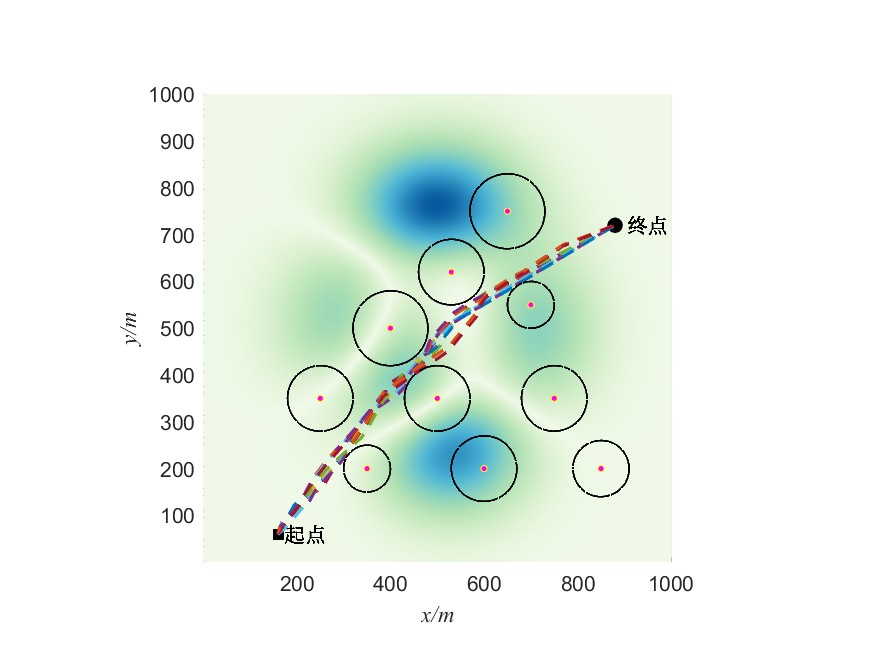
详细介绍
(一)多目标螳螂搜索算法(Multi-objective Mantis Search Algorithm ,MOMSA)求解无人机三维路径规划(MATLAB代码)-CSDN博客
完整MATLAB代码
点击main.m即可运行,可以修改障碍物位置。