一、无人机模型
参考文献:
[1]吕石磊,范仁杰,李震,陈嘉鸿,谢家兴.基于改进蝙蝠算法和圆柱坐标系的农业无人机航迹规划[J/OL].农业机械学报:1-19
[2]褚宏悦,易军凯.无人机安全路径规划的混沌粒子群优化研究[J/OL].控制工程:1-8
[3]MD Phung, Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization: arXiv, 10.1016/j.asoc.2021.107376[P]. 2021.
[4]陈明强,李奇峰,冯树娟等.基于改进粒子群算法的无人机三维航迹规划[J].无线电工程,2023,53(02):394-400.
[5]徐建新,孙纬,马超.基于改进粒子群算法的无人机三维路径规划[J/OL].电光与控制:1-10
[6]Chen Huang, Xiangbing Zhou, Xiaojuan Ran, Jiamiao Wang, Huayue Chen, Wu Deng,Adaptive cylinder vector particle swarm optimization with differential evolution for UAV path planning,Engineering Applications of Artificial Intelligence,2023,121
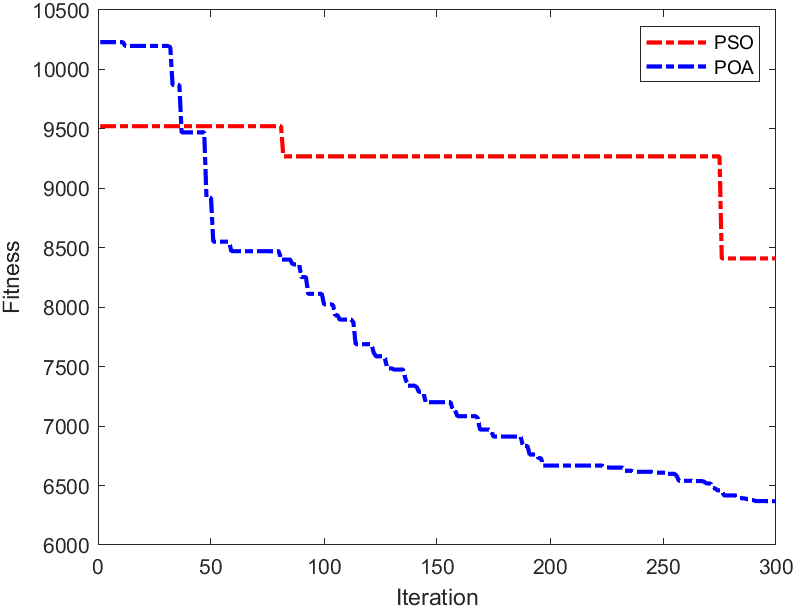
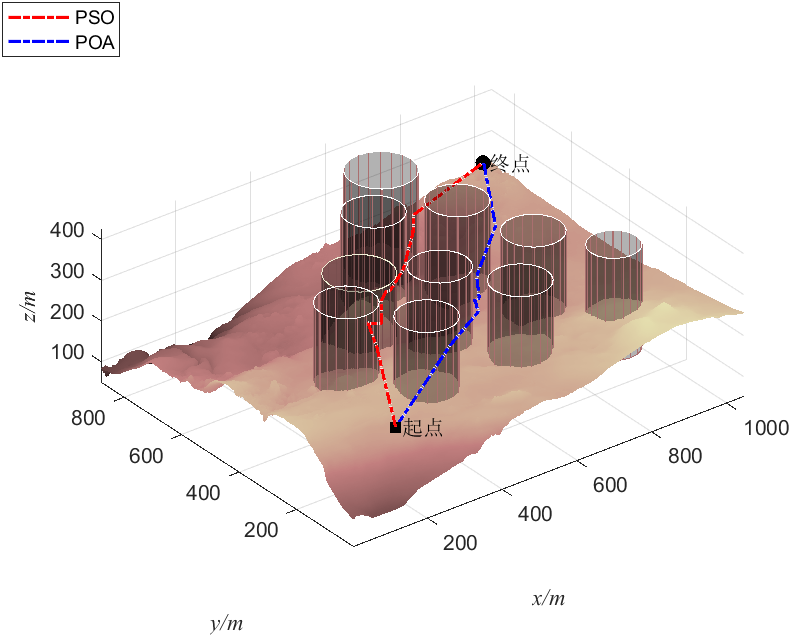
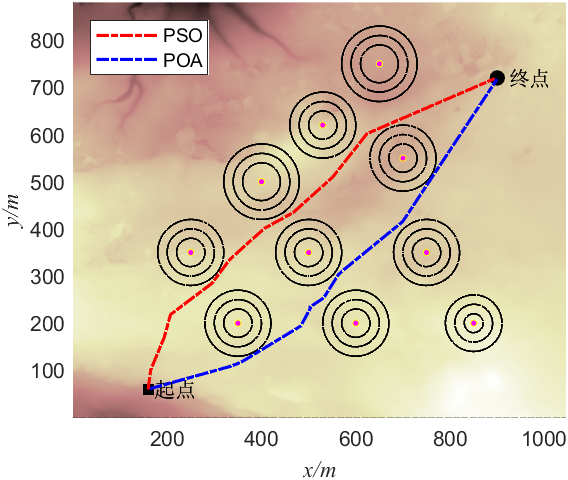
二、部分结果
三、完整MATLAB代码
点击main.m即可运行