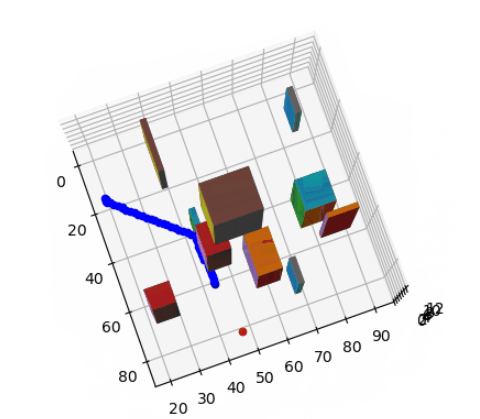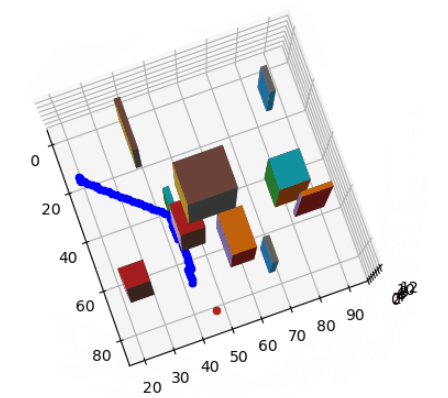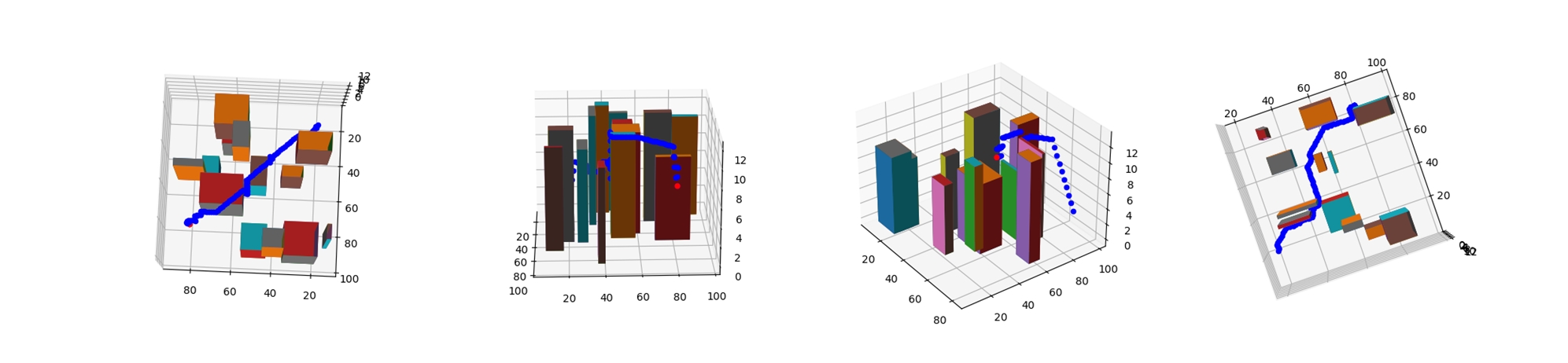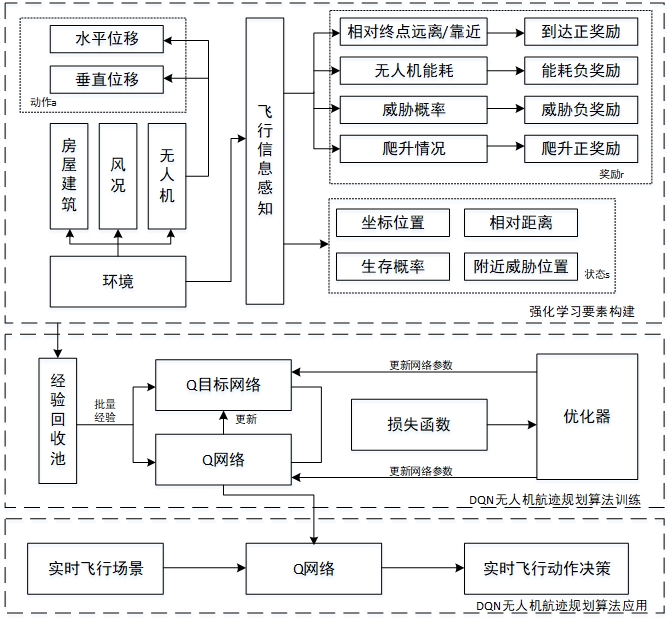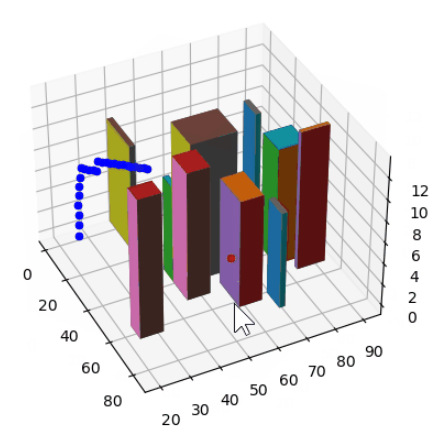
基于强化学习算法DQN实现离散3维城市空间环境下的智能航线规划,能根据无人机感知进行避障,并根据风速情况选择能耗较低的路线。
付费完成后面包多网站会在本页面下方自动解锁资源下载链接,划动到页面下方就能看到了,点击下载即可。购买可开发票,后台私信即可
百度网盘下载
在x100 y100 z22的三维空间中,采用课程学习方式对无人机智能体进行训练,利用设置好的不同难度的课程对智能体进行梯度训练,能让智能体更快地获取决策经验。由于训练初期缺乏决策经验,需要随机选择行为对环境进行试探,本文设置随机试探周期为1000,周期内采用ε-贪心策略选择智能体行为,周期内贪心概率从1逐渐递减到0.01。1000周期后贪心概率保持在0.01。在一个周期的训练场景中随机生成15个无人机对象,当所有无人机进入终止状态(电量耗尽、坠毁、到达目标点、超过最大步长)后进入下一个周期的训练,当80%以上的无人机能够到达目标点时进入下一难度等级的训练。 经过13万周期、19小时的迭代训练,最终无人机智能体能够在难度10的环境中以较高的任务完成率安全到达目标点。