主要内容:
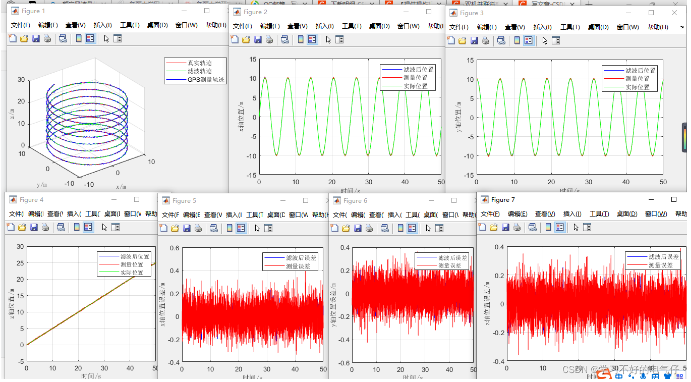
基于GPS+IMU的卡尔曼滤波融合定位算法仿真,其中惯导用来进行状态预测,GPS用来滤波矫正,用于GPS+IMU的卡尔曼滤波融合定位算法算法编程学习!!!
部分代码:
%基本参数初始化
step = 0.01; %设定步长
start_time = 0;
end_time = 50; %设定测量时间
tspan = [start_time:step:end_time]';
N = length(tspan);
Ar = 10;
r = [Ar*sin(tspan) Ar*cos(tspan) 0.5*tspan]; %生成实际轨迹数据
v = [Ar*cos(tspan) -Ar*sin(tspan) ones(N,1)];
acc_inertial = [-Ar*sin(tspan) -Ar*cos(tspan) zeros(N,1)];
atti = [0.1*sin(tspan) 0.1*sin(tspan) 0.1*sin(tspan)];
Datti = [0.1*cos(tspan) 0.1*cos(tspan) 0.1*cos(tspan)];
g = [0 0 -9.8]';
gyro_pure = zeros(N,3);
acc_pure = zeros(N,3);
gps_pure= r;
a = wgn(N,1,1)/5;
b = zeros(N,1);
b(1) = a(1)*step;
%生成无噪声的imu数据
for iter = 1:N
A = attiCalculator.Datti2w(atti(iter,:));
gyro_pure(iter,:) = Datti(iter,:)*A';
cnb = attiCalculator.a2cnb(atti(iter,:));
acc_pure(iter,:) = cnb*(acc_inertial(iter,:)' - g);
end
运行结果: