获取完整数据和代码,请直接+
kang20224
提出一种融合模糊粒化概率递归图和CNN的旋转机械故障诊断方法,首先对原始一维振动信号进行相空间重构,并采用Z型隶属度函数将每个嵌入维度的坐标值划分为多个模糊粒,构建模糊特征矩阵;然后基于欧氏距离计算高斯核概率递归矩阵,生成反映系统动态演化特性的二维递归图,并通过双线性插值统一缩放至固定尺寸;最后将递归图作为输入,利用深度卷积神经网络自动提取多层级纹理与结构特征,实现端到端的故障诊断。
算法步骤
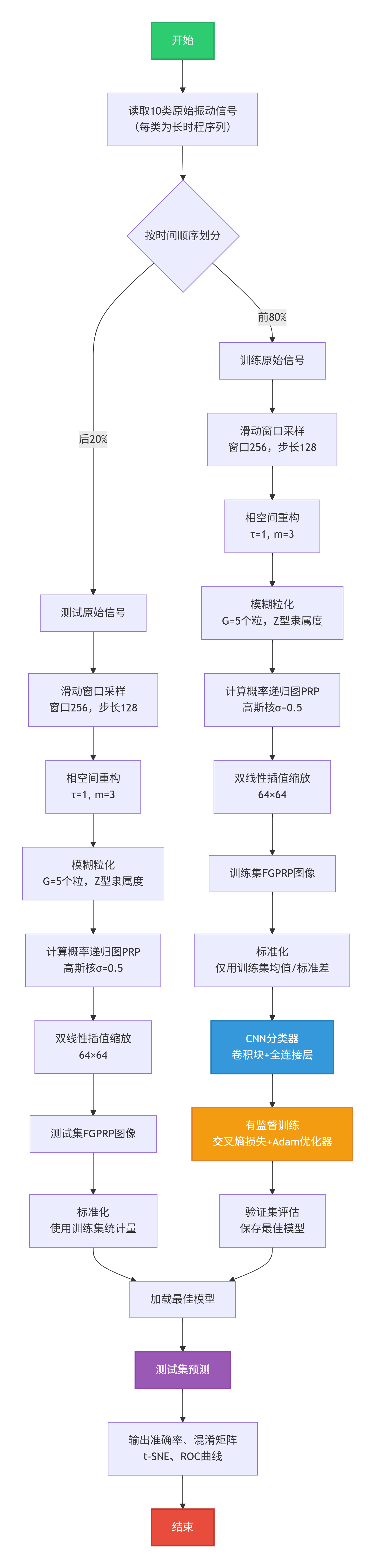
信号预处理与滑动窗口采样
对每个故障类别的原始长时程振动信号,按时间顺序划分为前80%训练段和后20%测试段。在训练段与测试段上分别以固定窗长256、步长128进行无重叠滑动窗口采样,生成原始信号片段集合。
相空间重构
对每个信号片段,采用延迟嵌入法(延迟步长τ=1,嵌入维数m=3)重构高维相空间,得到状态点矩阵Y(大小N×m,N为重构点数)。
模糊粒化与特征映射
确定相空间各维度的全局最小值与最大值,均匀划分G=5个粒中心,定义降半梯形Z型隶属度函数。计算每个状态点在每个维度上对各粒的隶属度,形成模糊隶属度张量Memb(大小N×m×G),并展平为特征矩阵U(大小N×mG)。
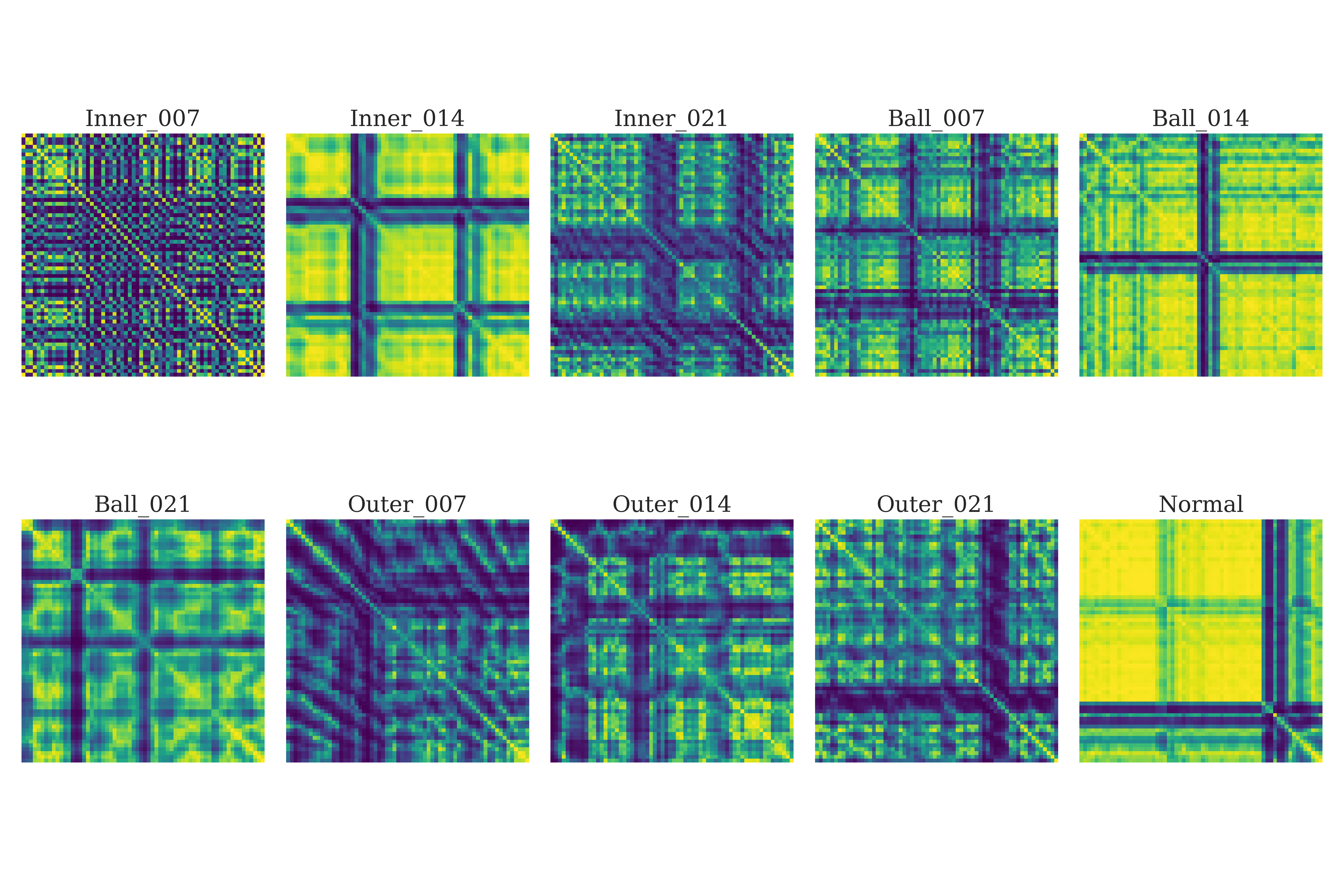
概率递归图生成
计算特征矩阵U中所有状态点对之间的欧氏距离,利用高斯核(宽度σ=0.5)将距离转换为概率递归强度,得到N×N的原始递归图矩阵PRP。
图像缩放与标准化
采用双线性插值将不同尺寸的递归图统一缩放到64×64像素,形成灰度图像。仅利用训练集图像计算全局均值和标准差,对训练集和测试集分别进行Z-score标准化。
卷积神经网络分类
构建包含三个卷积块(输出通道32→64→128)、自适应池化和两层全连接层的CNN分类器。将训练集的FGPRP图像输入网络,使用交叉熵损失和Adam优化器进行有监督训练,从训练集中随机抽取20%作为验证集以保存最佳模型。
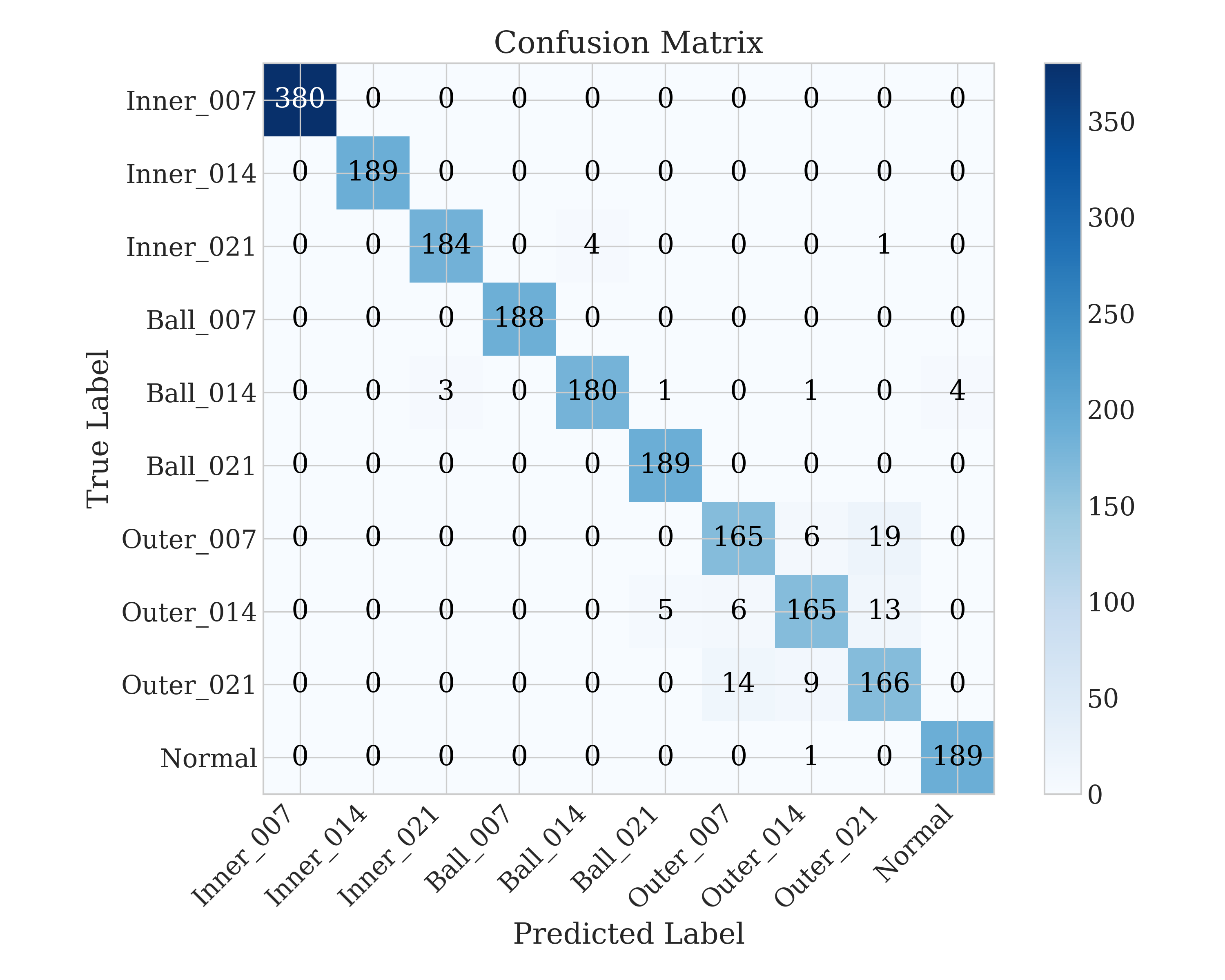
测试评估与可视化
加载验证准确率最高的模型,在独立测试集上计算总体准确率、混淆矩阵、ROC曲线,并对CNN提取的倒数第二层特征进行t‑SNE降维可视化,综合分析模型性能与特征可分性。