付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行无水印)
1.功能介绍
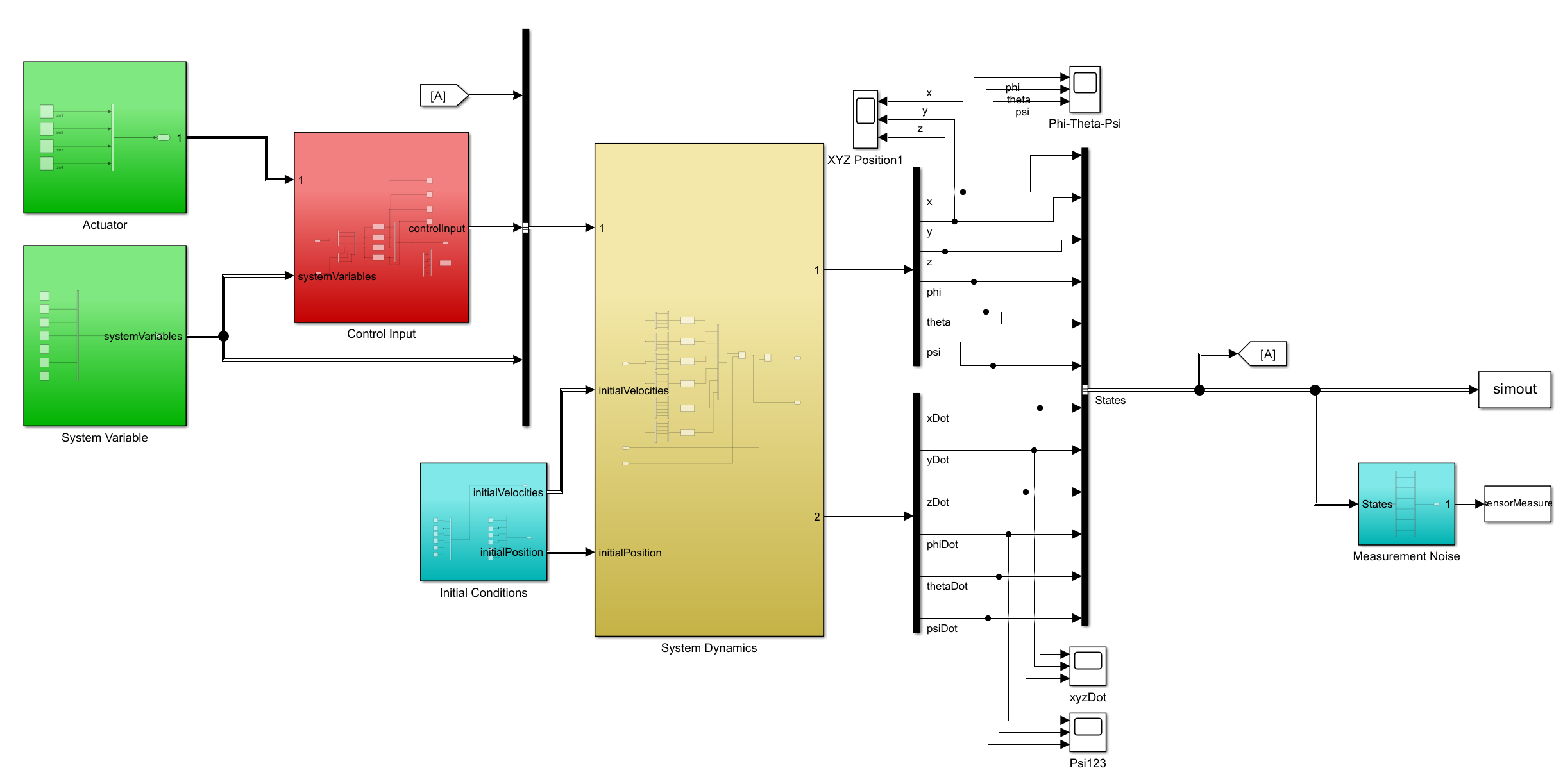
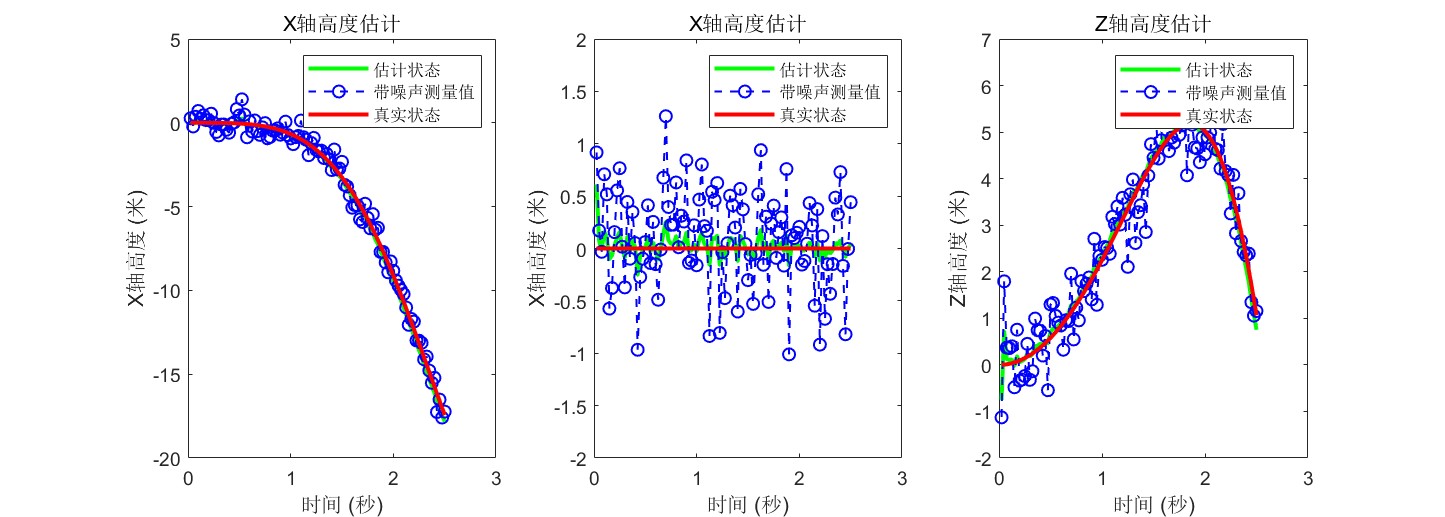
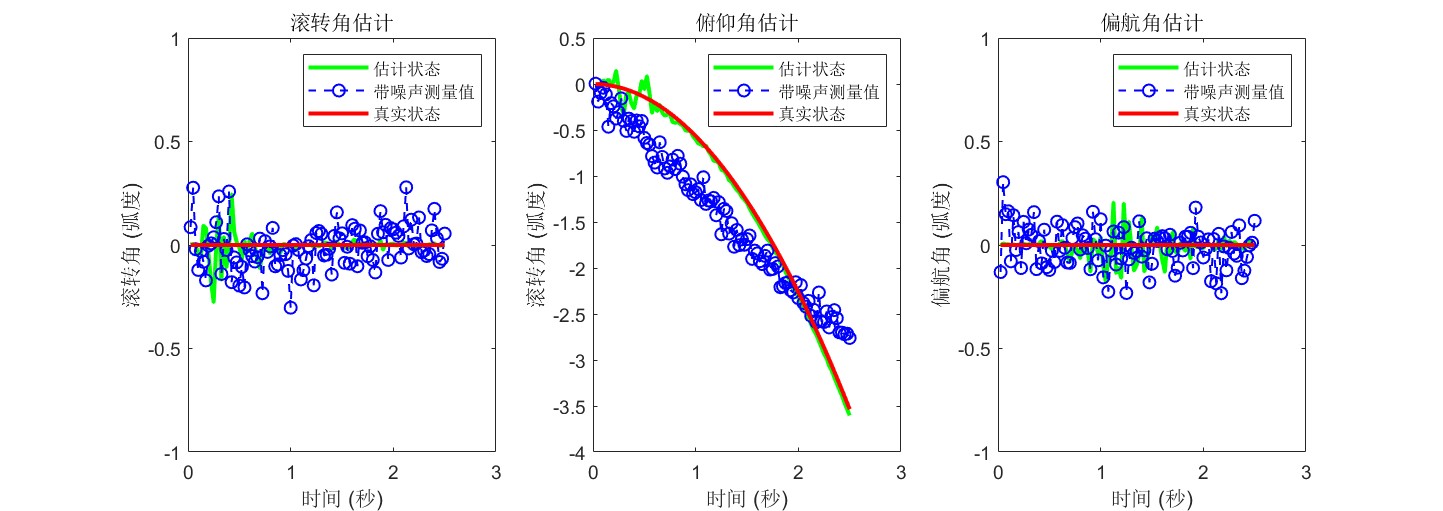
四旋翼飞行器是典型的欠驱动、强耦合非线性系统,其飞行状态包含位置、姿态、线速度与角速度等关键信息。在实际飞行中,GPS、陀螺仪等传感器会引入测量噪声,直接使用原始数据无法满足高精度 控制需求。扩展卡尔曼滤波通过对非线性系统进行线性化近似,在噪声环境下实现对真实状态的最优估计,是四旋翼状态感知与稳定控制的核心技术。
2.使用版本
matlab2024b
3.本作品包含内容
项目工程源文件/完整程序,中文注释,程序操作方法视频,matlab软件下载链接
4.仿真测试效果截图