付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行无水印)
1.功能介绍
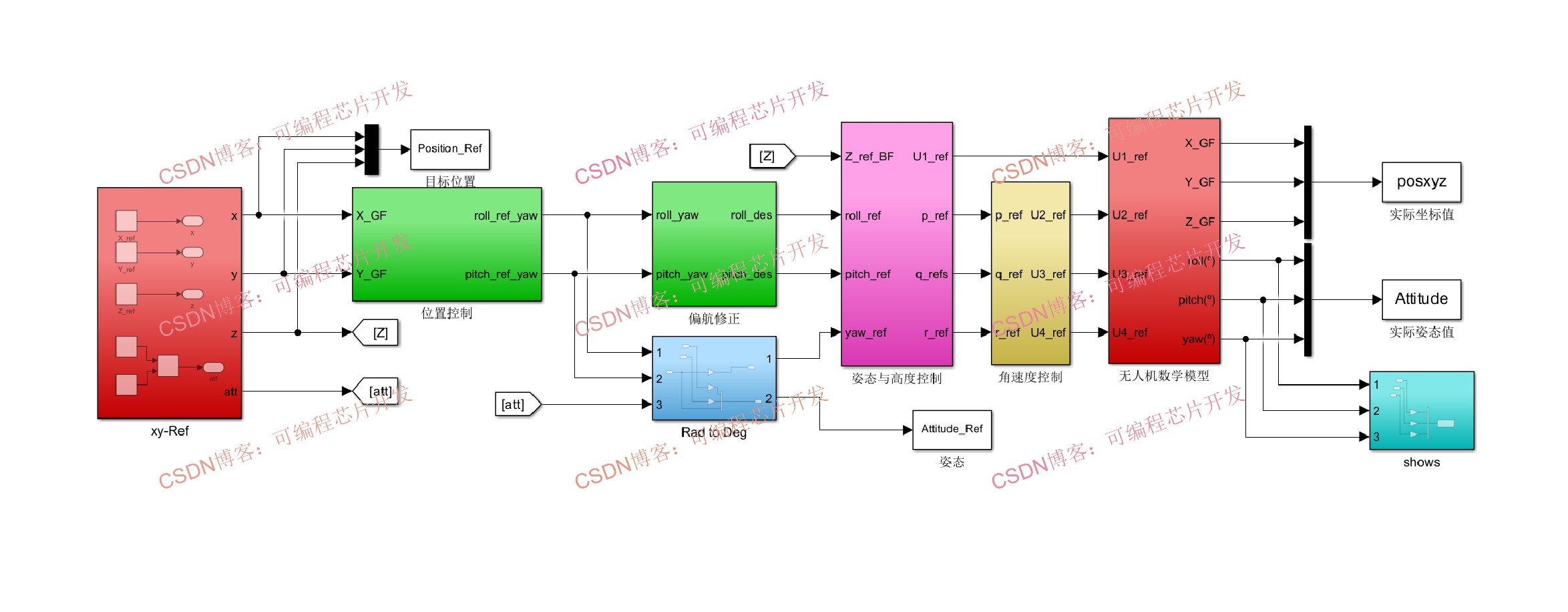
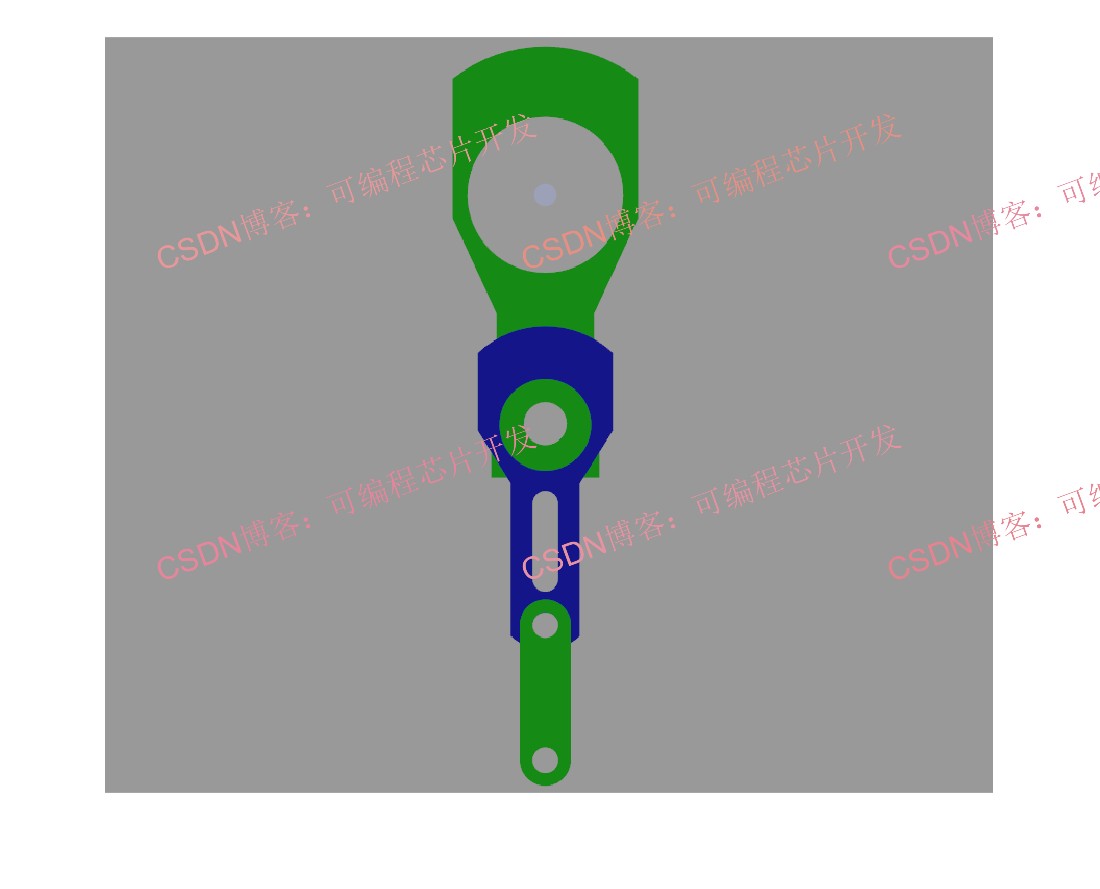
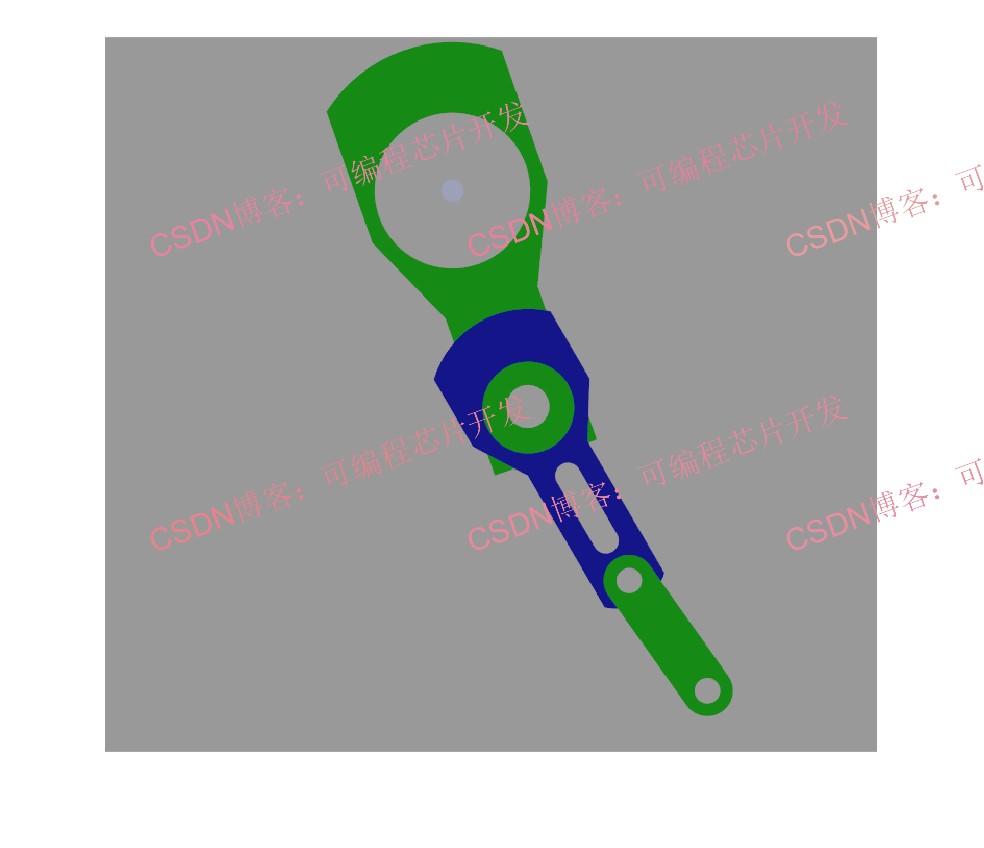
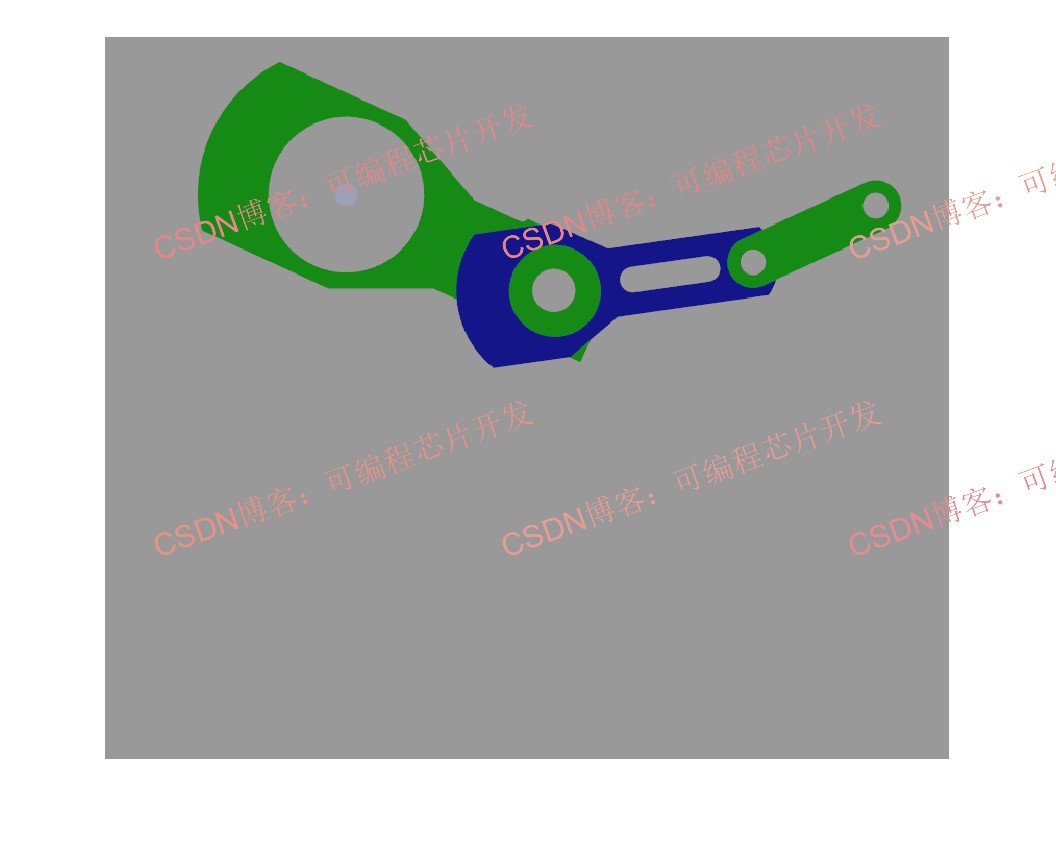
机械臂作为工业自动化 、智能机器人领域的核心执行机构,其轨迹跟踪精度、抗干扰能力与动态响应速度直接决定作业性能。传统PID控制在模型失配、外部扰动与参数摄动场景下易出现跟踪误差偏大、响应滞后等问题,而滑模变结构控制(SMC)凭借对系统不确定性与外部干扰的强鲁棒性、控制结构简洁易实现等优势,成为机械臂高精度控制的优选方案。指数趋近律作为滑模控制中优化趋近运动的核心方法,可有效解决传统滑模控制存在的抖振问题,同时保证系统状态快速趋近滑模面。
2.使用版本
matlab2024b
3.本作品包含内容
项目工程源文件/完整程序,中文注释,程序操作方法视频,matlab软件下载链接
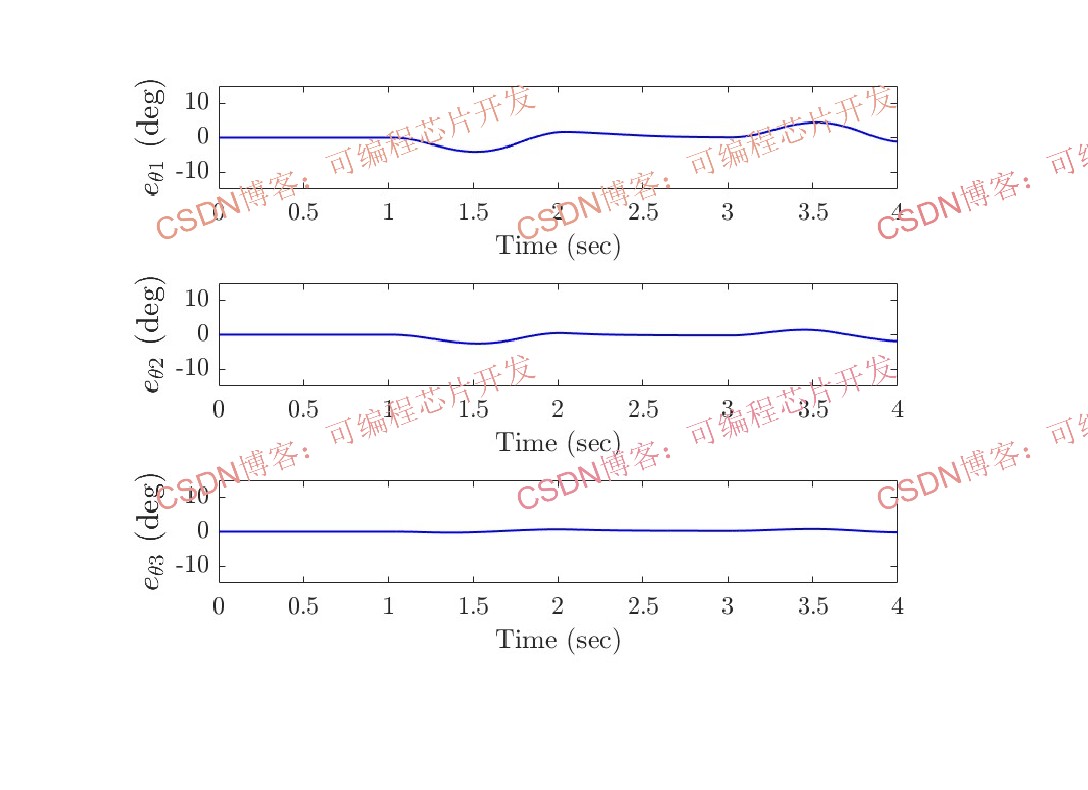
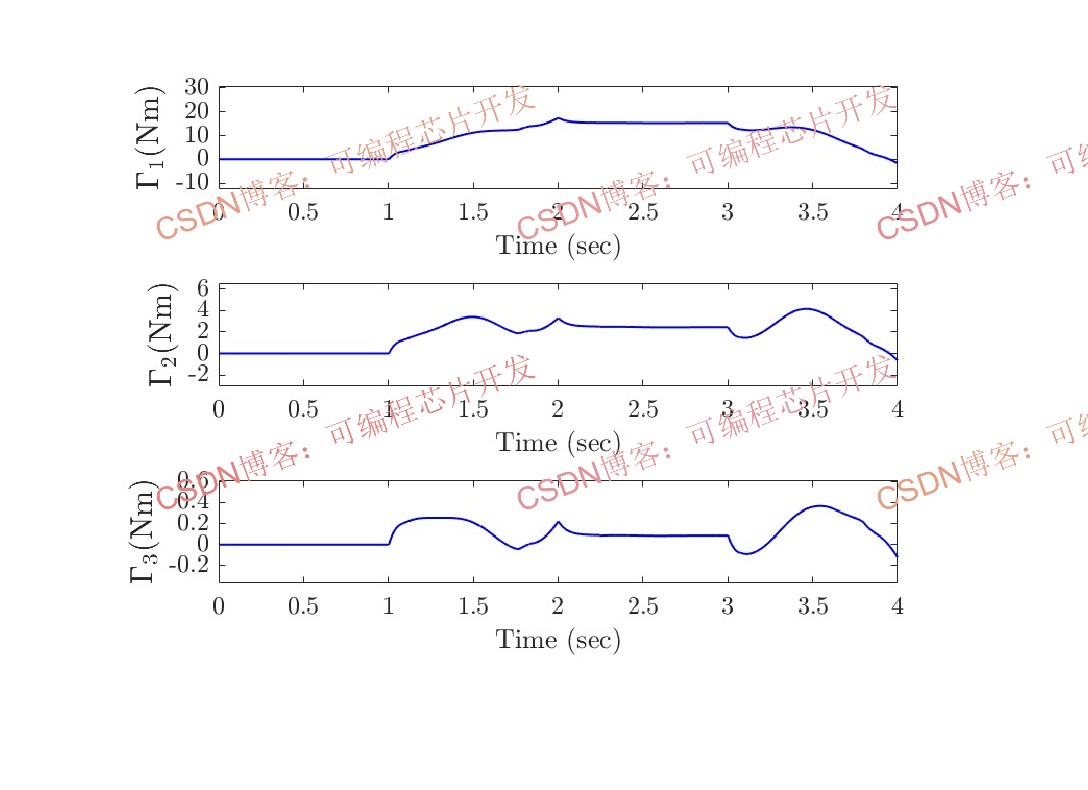
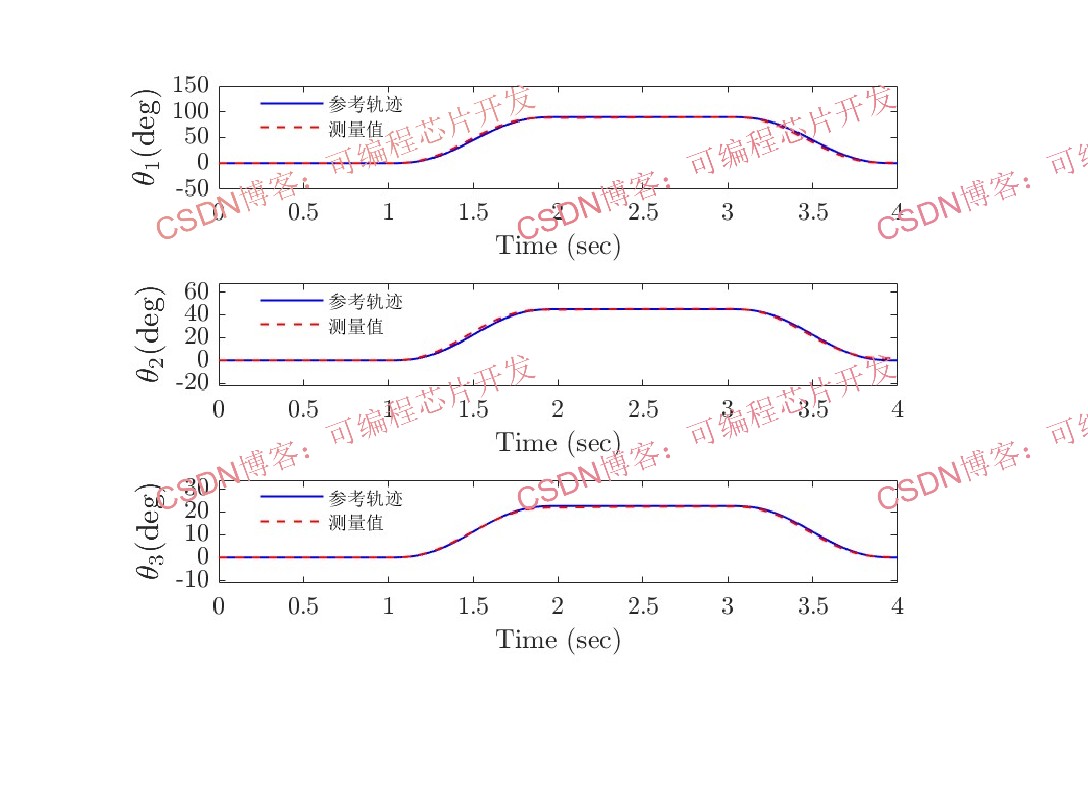
4.仿真测试效果截图