科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
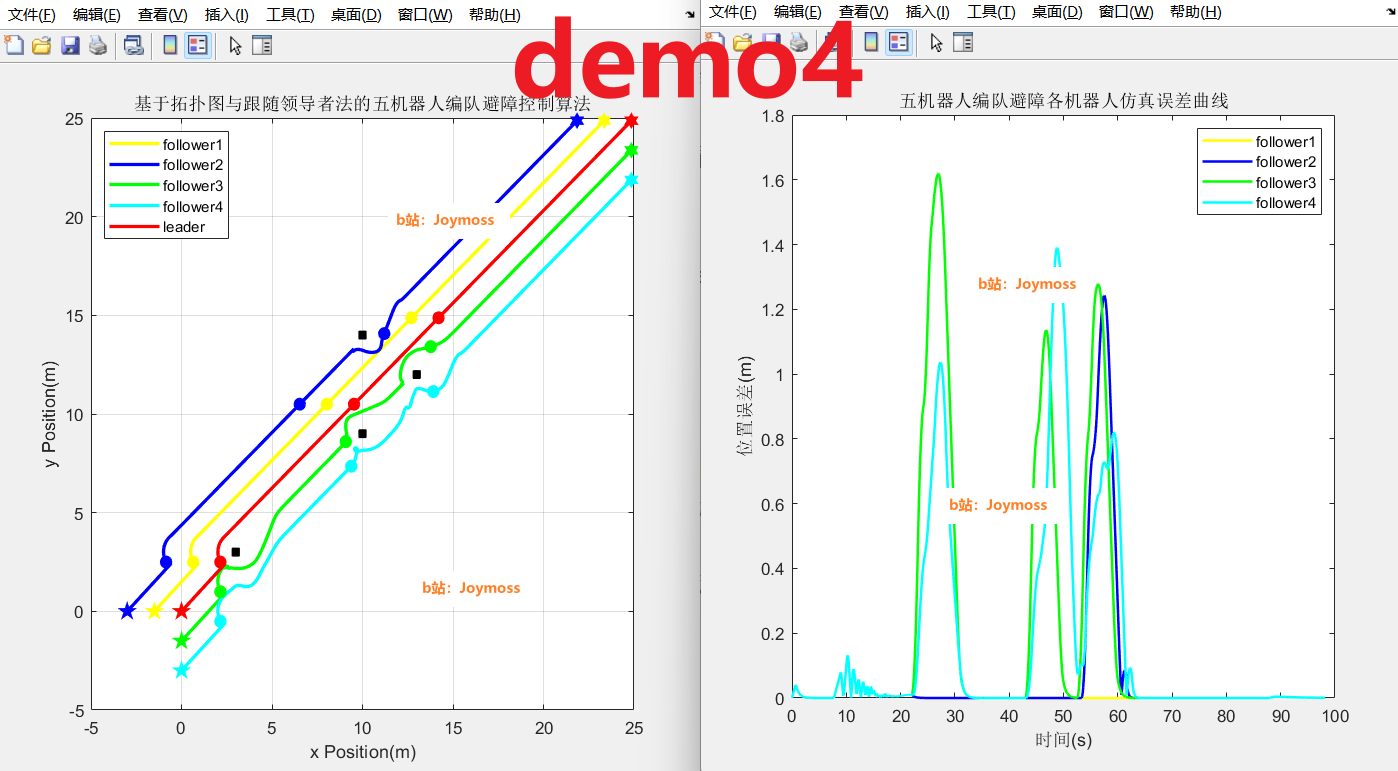
领导者-跟随者多智能体编队避障与队形切换控制:基于一致性算法+人工势场法避障算法
1.领导者-跟随者编队控制:领航者(leader)向目标点运动,跟随者(follower)通过一致性算法保持与领航者及邻居的相对位置,利用图拓扑矩阵A定义通信关系
2.一致性算法:跟随者的速度控制基于邻居位置误差的加权和,使队形收敛到期望的相对间隔
3.人工势场法避障:通过斥力函数使机器人避开其他机器人、攻击者及环境障碍物,斥力影响速度指令。
4.局部极小逃逸:当速度过小时随机施加扰动,避免陷入局部极小。
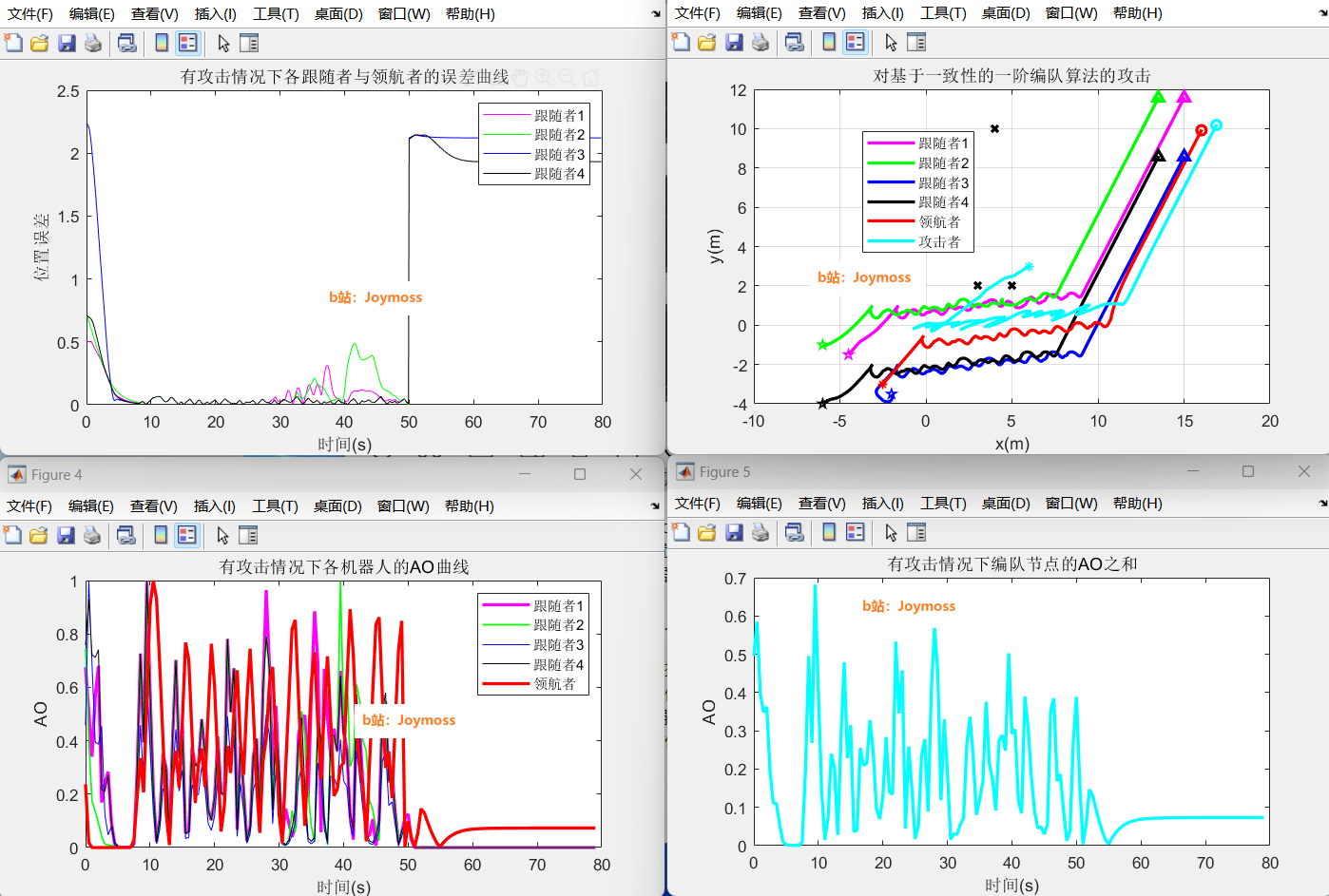
5.攻击检测与防御:计算各机器人的轨迹偏差(AO值),通过机器学习(SVM)识别受攻击节点,并动态调整控制拓扑以维持编队。
6.队形切换:在仿真过程中改变期望相对位置,实现队形变换。
7.四个demo,实现内容如下:
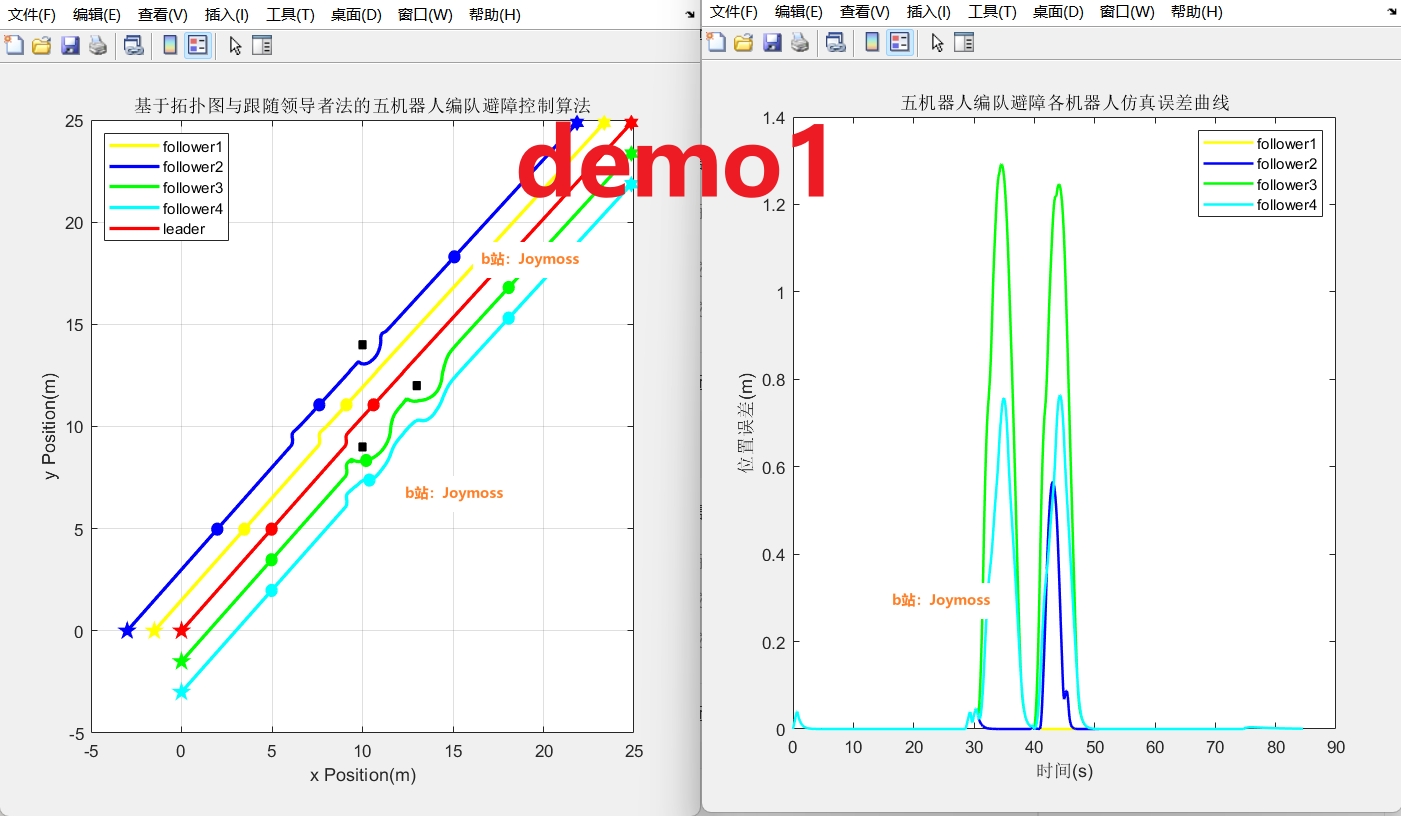
(1)demo1:基础版本,实现固定队形的编队避障控制,无队形切换,障碍物为点状。
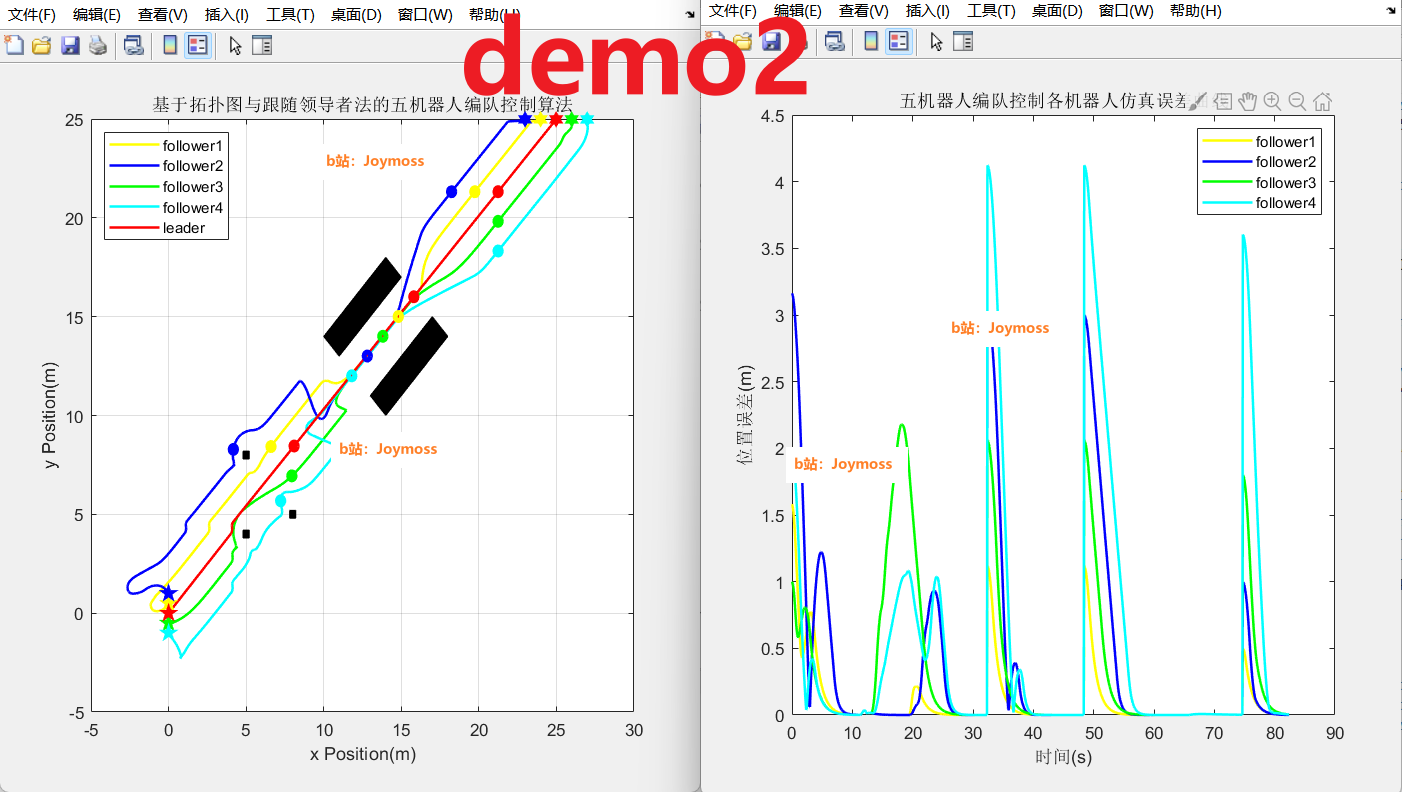
(2)demo2:在 demo1 基础上增加了队形切换功能(特定时刻改变队形),并在到达目标点后短暂驻停。
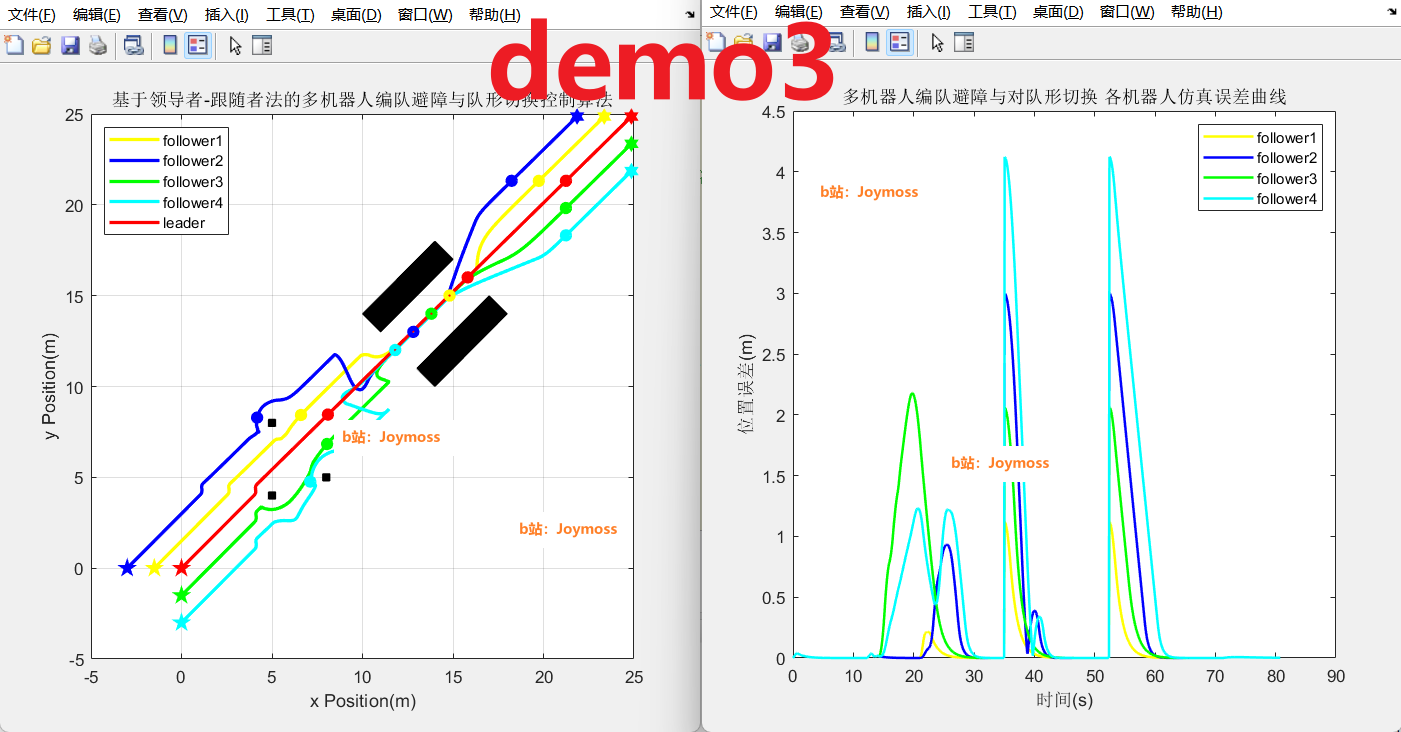
(3)demo3:与 demo2 类似,但队形切换时刻不同,并增加了矩形障碍物(填充多边形),动画更丰富。
(4)demo4:在 demo1 基础上增加了多个障碍物,并计算保存各机器人的异常度(AO)数据供攻击检测使用,未启用队形切换。