付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行后无水印)
1.作品简介
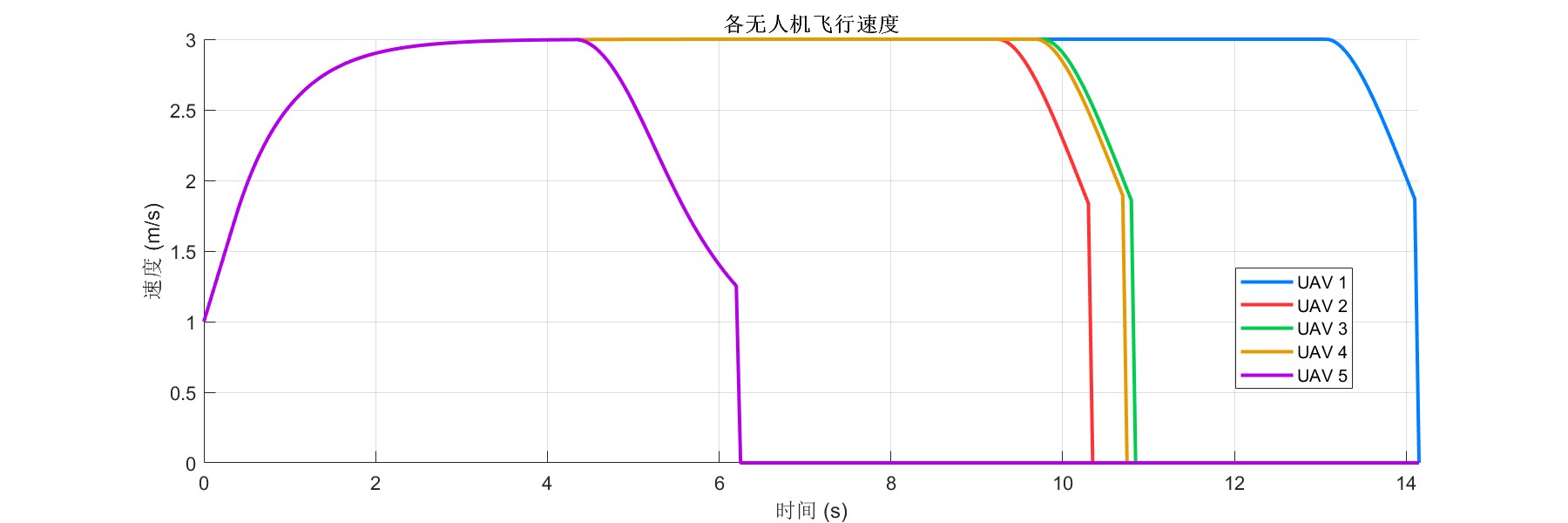
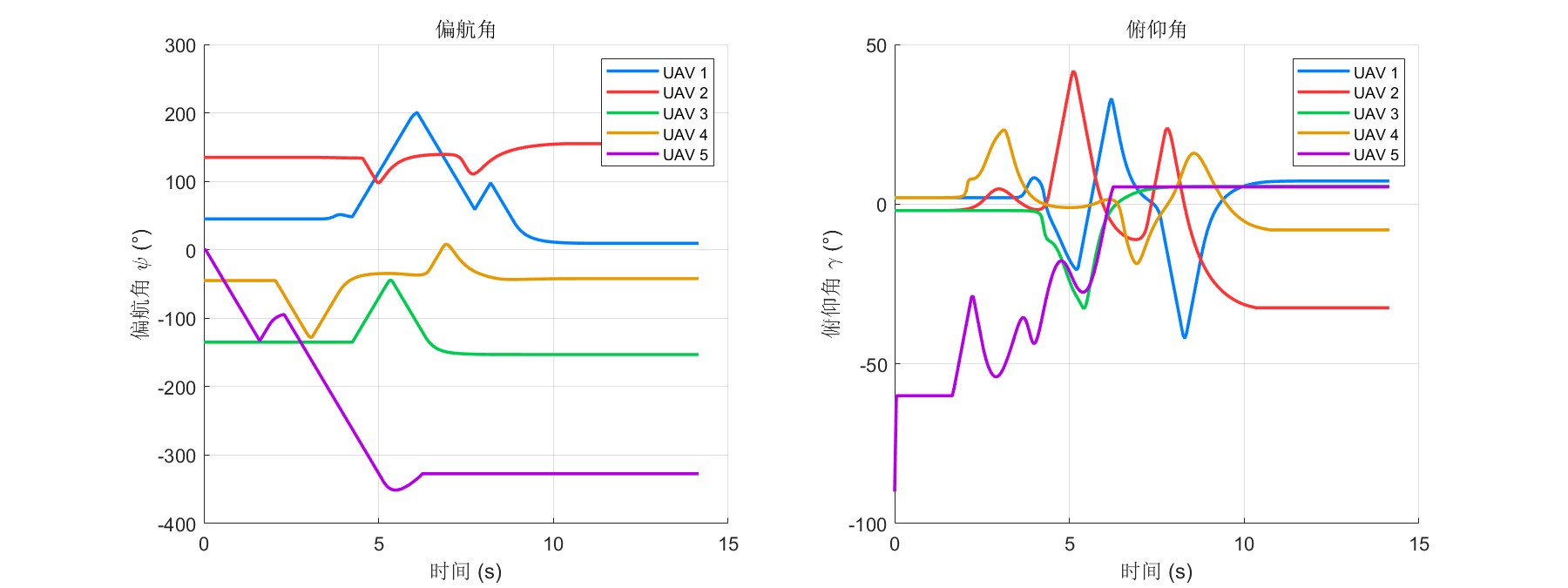
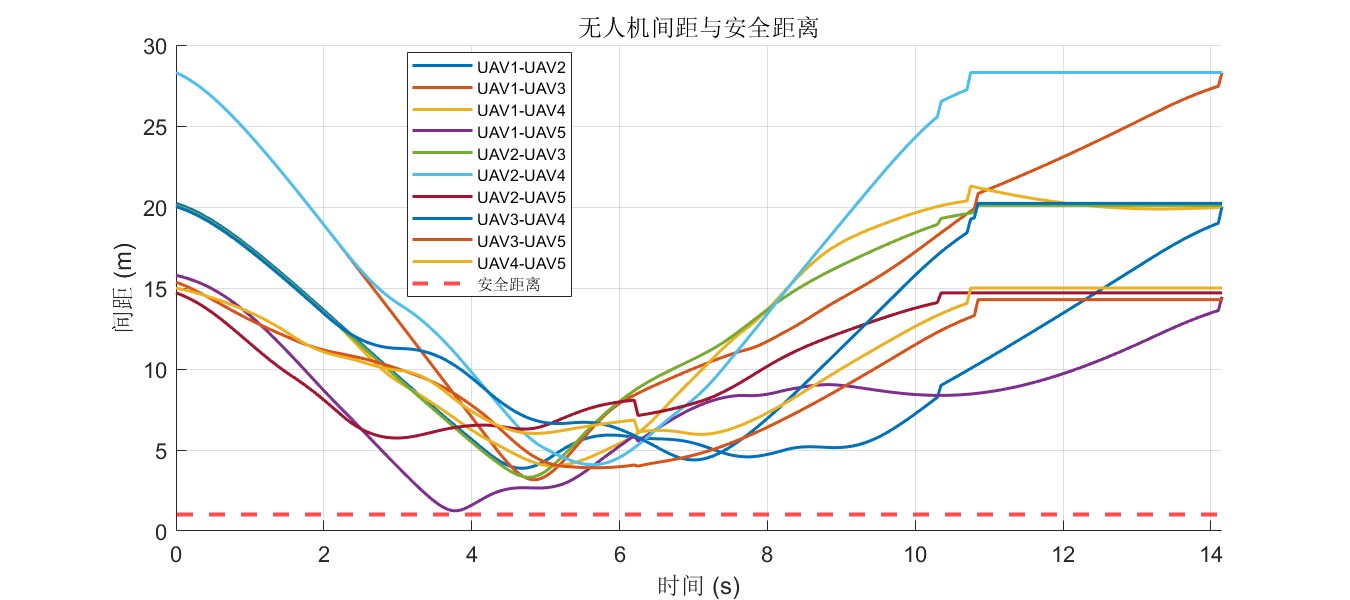
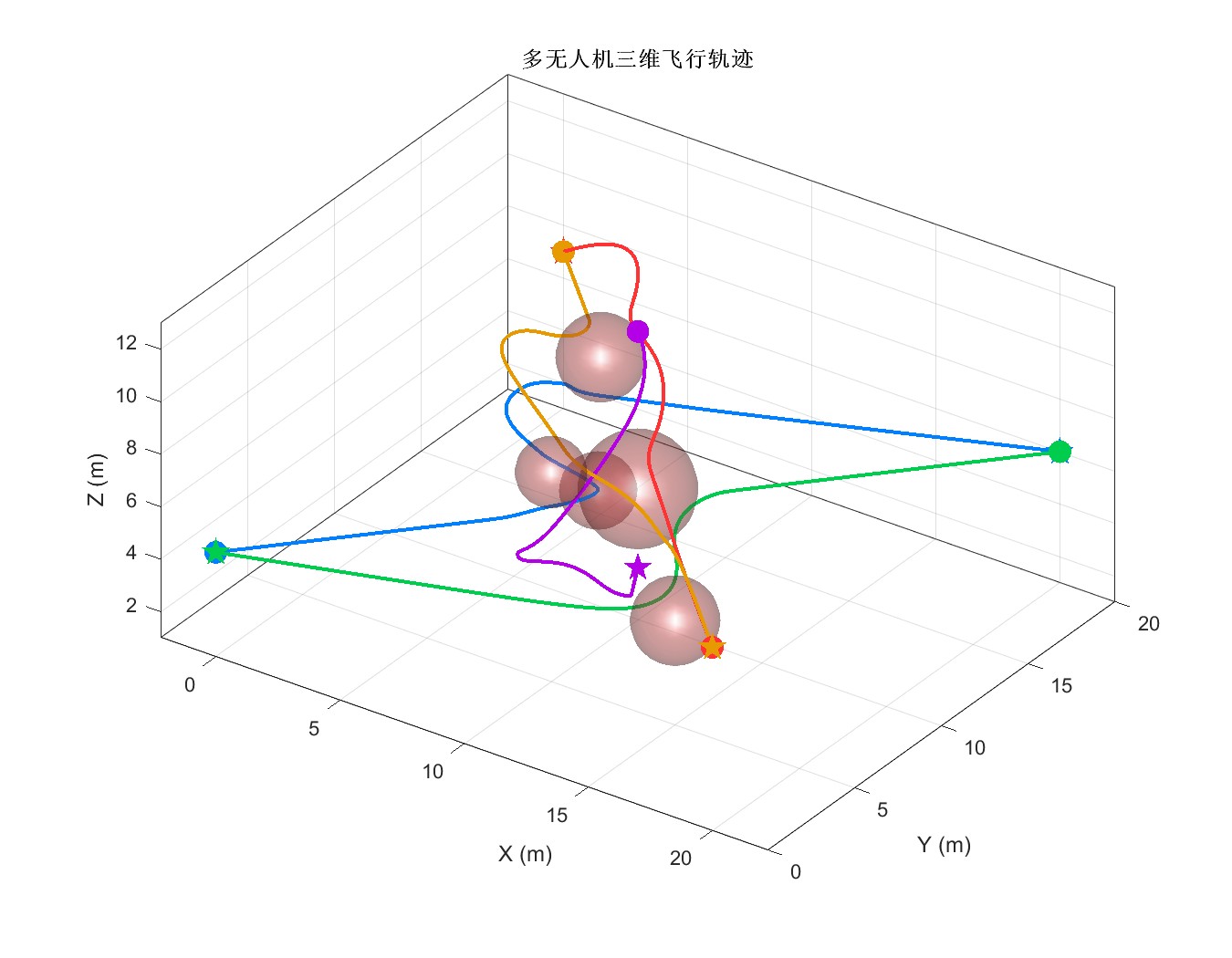
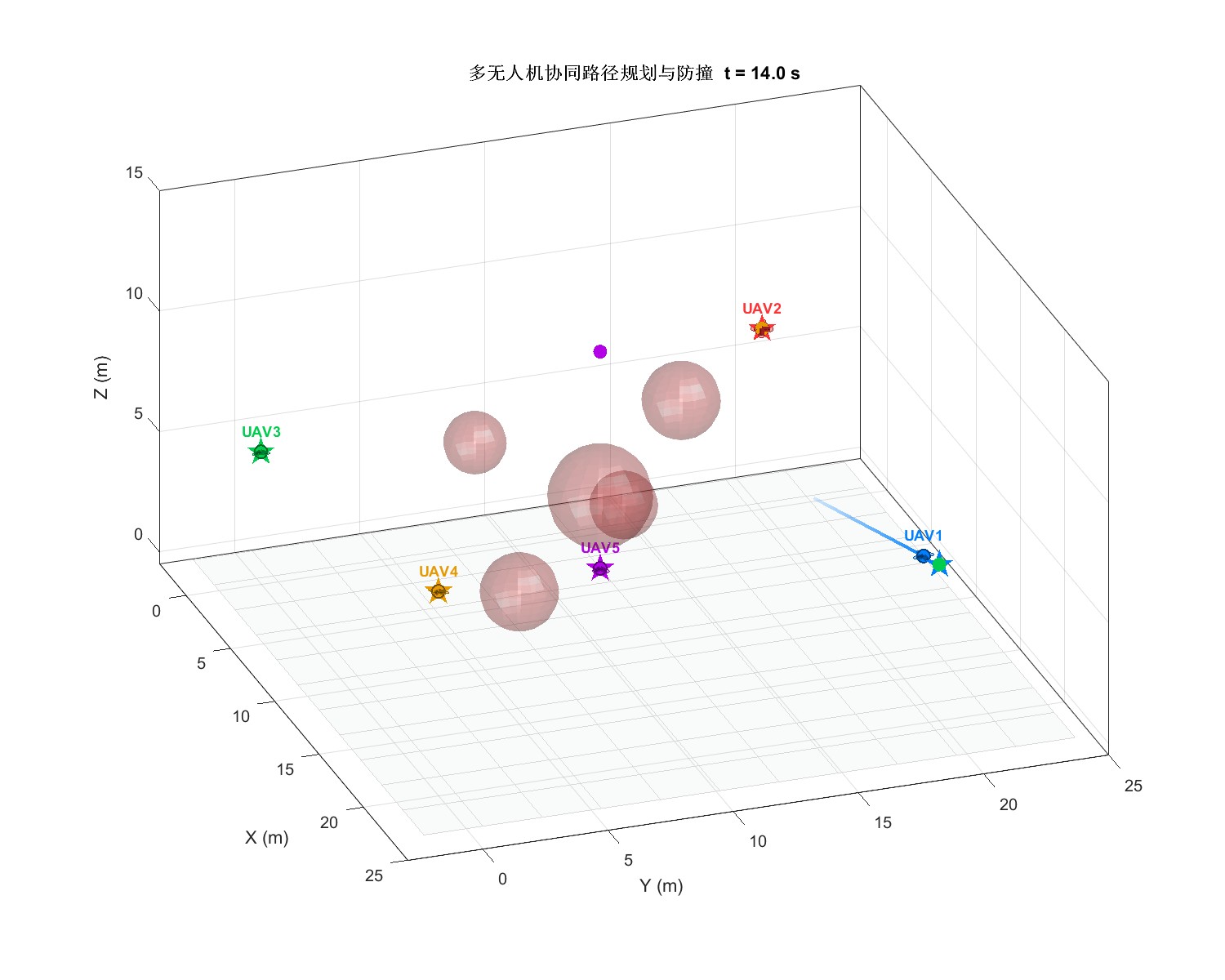
多无人机协同路径规划与防撞系统是无人机集群执行侦察、巡检、物资投送等任务的核心技术,其核心目标是让多架无人机在三维空间中,从不同起点独立飞往目标点,同时自主规避静态障碍物、避免机间碰撞,且严格遵循飞行物理约束。本文基于 MATLAB 仿真程序,深度解析人工势场法实现的多无人机协同路径规划与分布式防撞系统,涵盖核心算法原理、运动约束、协同机制、防撞逻辑及仿真验证全流程,揭示无人机集群自主导航的底层技术逻辑。该仿真系统部署5架无人机,在包含5个三维球形障碍物的空间内执行任务,通过引力-斥力复合势场实现路径规划,结合分布式感知与控制完成防撞,全程满足速度、加速度、角度等物理限制,最终实现无碰撞、高精度的协同飞行,是工业级无人机集群控制的典型轻量化实现方案。
2.软件版本
matlab2024b
3.作品包含内容
项目工程源文件/完整程序,中文注释,程序操作方法讲解视频
4.仿真效果