付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行无水印)
1.功能介绍
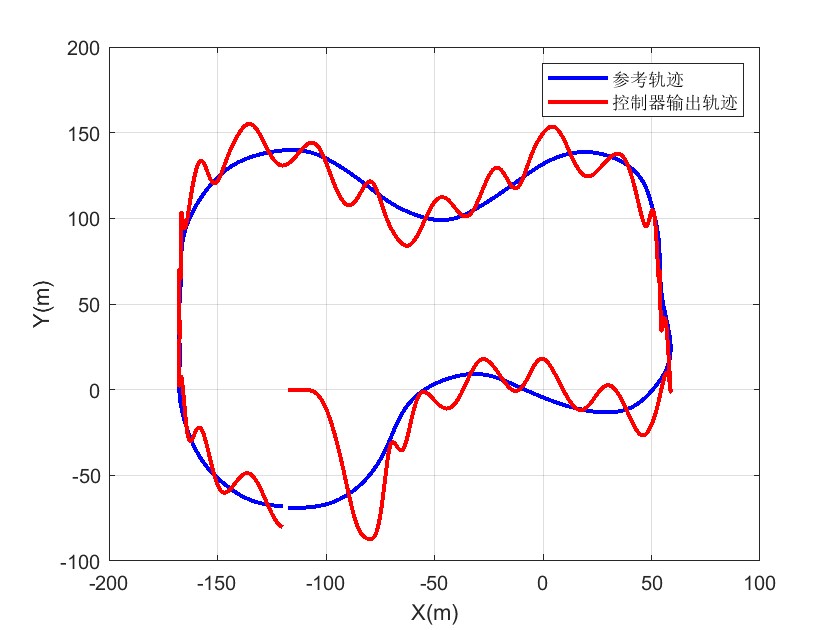
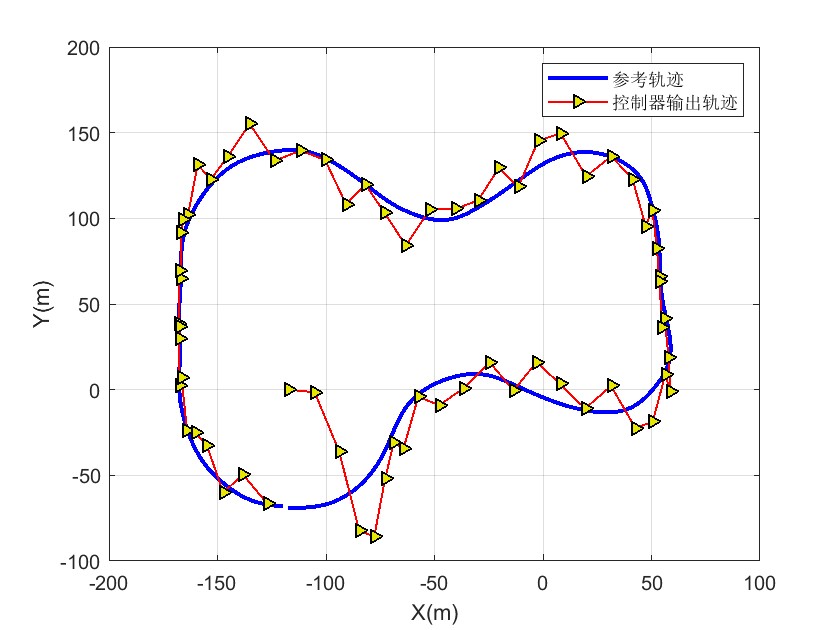
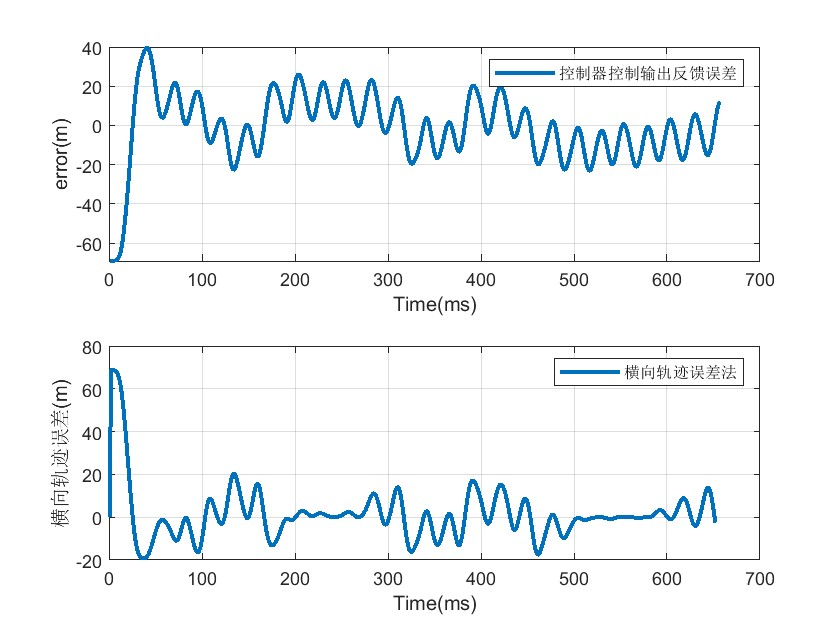
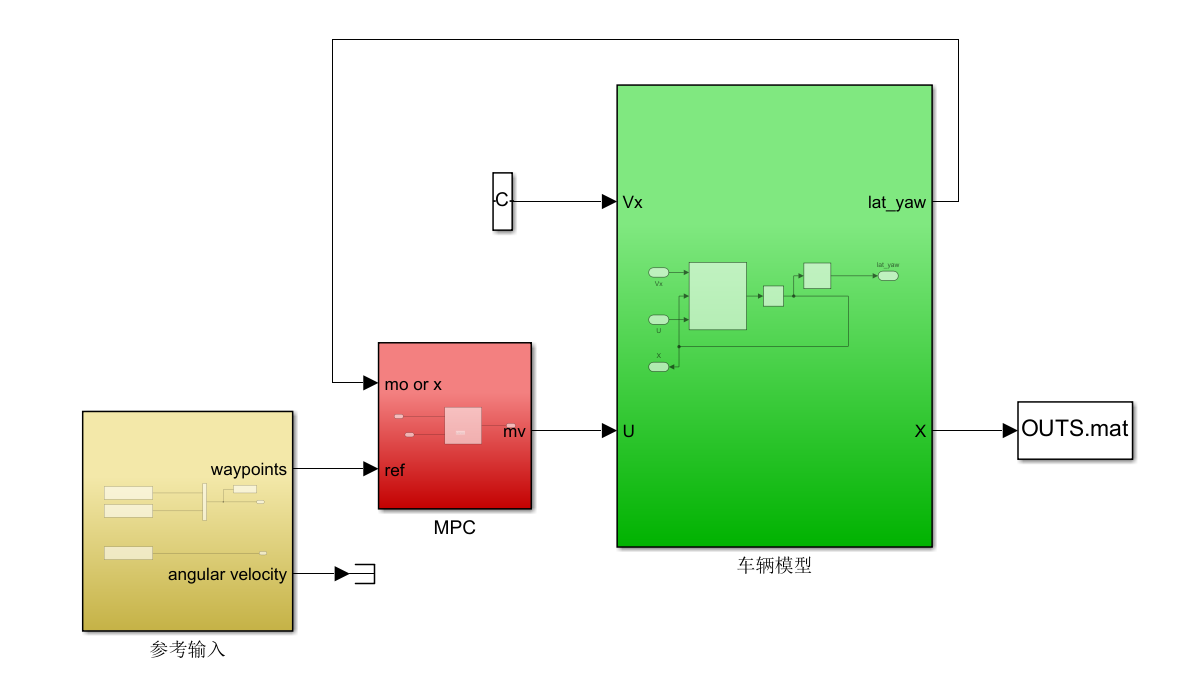
基于模型预测控制(MPC)的车辆横向控制,是自动驾驶领域实现车道保持、轨迹跟踪的核心技术。其核心是以车辆二自由度单轨动力学模型为预测模型,在每一个控制周期内,在线求解未来一段时域内的最优控制序列,仅执行当前时刻的控制量,通过滚动优化实现车辆横向轨迹的高精度跟踪;同时依托状态反馈修正模型误差,保证控制系统的鲁棒性。 本系统采用的线性二自由度车辆单轨模型,忽略了纵向动力学、悬架运动、车轮滚动等次要因素,仅保留侧向运动和横摆运动两个核心自由度,是车辆横向控制的经典简化模型,既能满足控制器设计的精度需求,又能保证计算实时性,适配 MPC 的在线优化要求。系统的控制目标是最小化横向轨迹误差(CTE) 和横摆角误差,让车辆实际行驶轨迹无限逼近参考轨迹。
2.使用版本
matlab2024b
3.本作品包含内容
项目工程源文件/完整程序,中文注释,程序操作方法视频,matlab软件下载链接
4.仿真测试效果截图