科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本是2018b,高版本直接可运行,低版本可以联系我降版本!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
基于IEEE 9节点低惯量电力系统混合拓扑的构网型变流器控制:下垂控制、虚拟同步机控制(VSM)、匹配控制与可调度虚拟振荡器控制(dVOC)四种电磁暂态仿真
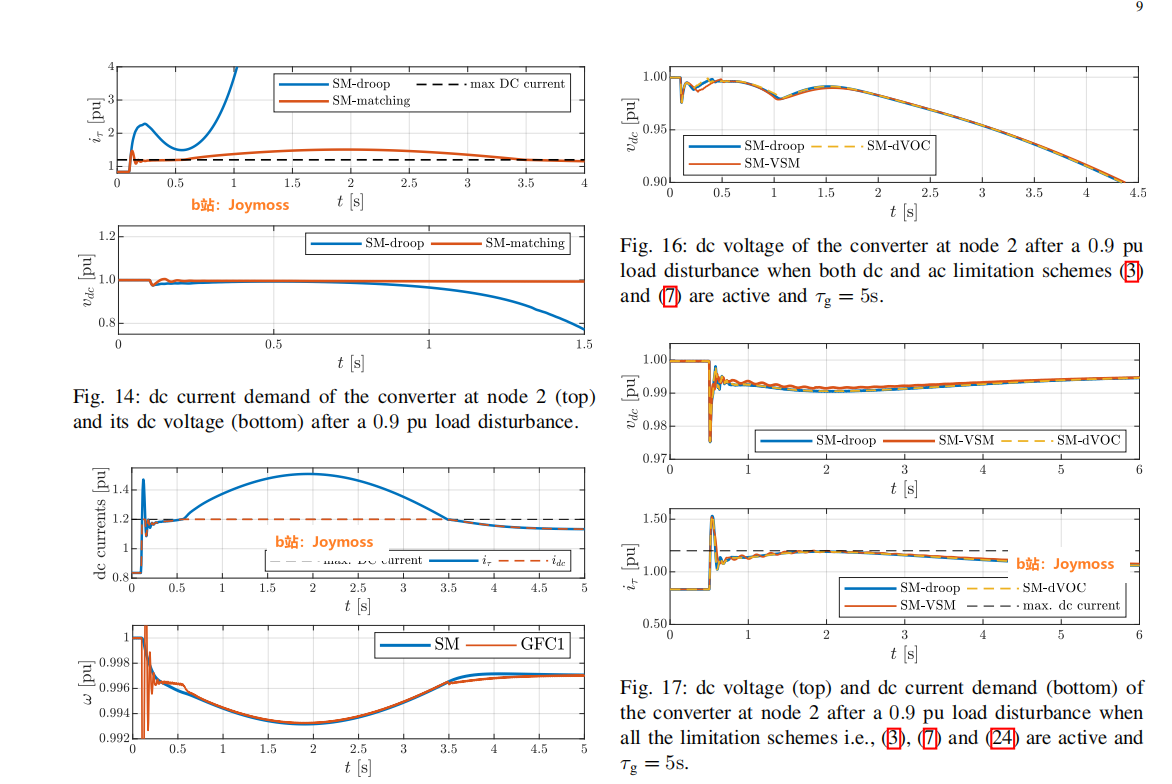
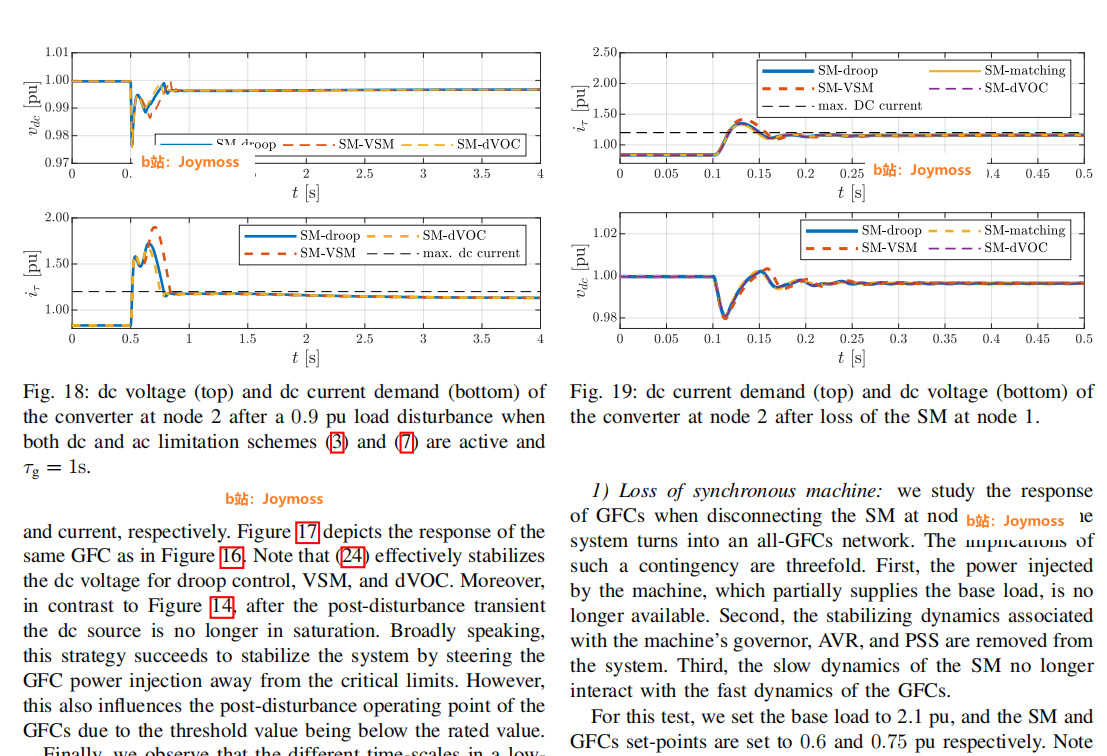
(!)复现文献《Frequency Stability of Synchronous Machines and Grid-Forming Power Converters》,提供对应的四种算法仿真。
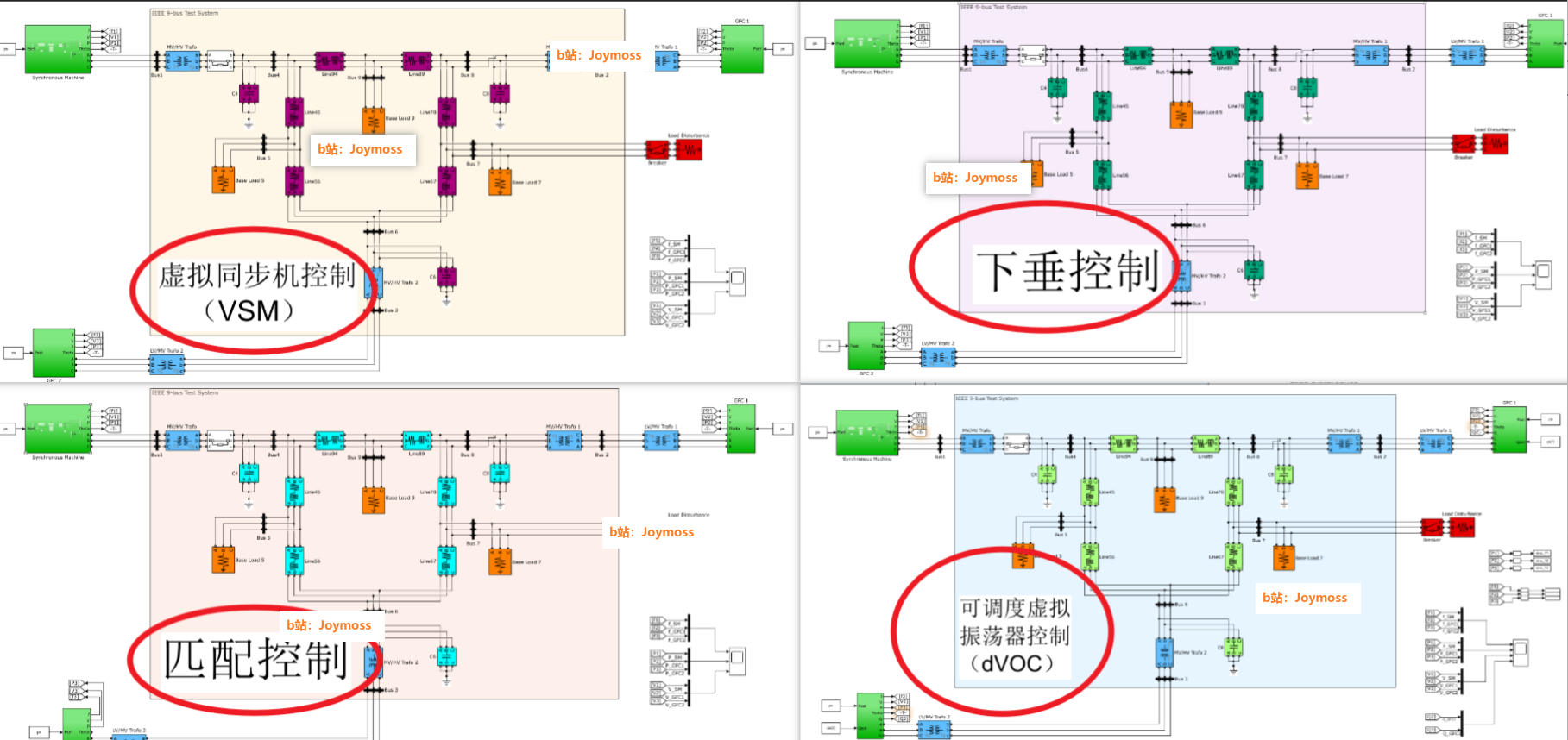
(!)该文献以IEEE9节点电力系统为基础搭建电磁暂态仿真电路,围绕低惯量电力系统频率稳定性研究,设计了下垂、虚拟同步机(VSM)、匹配、可调度虚拟振荡器(dVOC)四种构网型变流器控制策略,各策略对应论文专属控制框图,且配套有参数统一的MATLAB仿真脚本(droop.m/VSM.m/matching.m/dVOC.m),脚本以数值形式落地论文的算法原理与电路设计,形成“控制策略-框图实现-仿真验证”的完整研究体系,内容总结如下:
一、四种构网型变流器控制策略及对应控制框图
四种控制策略底层均采用交直流电压控制、电压/电流级联PI控制的统一框架,仿真脚本中电网、变流器、变压器等基础参数完全一致,仅依策略特性增设专属控制参数;各策略均基于论文图4(通用构网型控制架构)、图5(底层级联控制设计)实现,且各有唯一专属控制框图,脚本控制参数为框图逻辑的具体数值落地,核心原理与对应关系如下:
(1)下垂控制:模仿同步电机调速器的转速下垂特性,权衡功率注入与额定值的偏差、频率与额定值的偏差实现频率动态控制,通过PI控制器作用于输出电压误差以复刻同步电机自动电压调节器的功能,是构网型变流器控制的基准方案;对应仿真脚本droop.m,无额外专属参数,仅配置1%下垂率,匹配论文图6。
(2)虚拟同步机控制(VSM):引入虚拟转子惯量常数和虚拟阻尼项构建频率动态,虚拟阻尼借鉴同步电机的转速下垂响应,兼具瞬时阻尼特性与稳态下垂响应特性,通过PI控制器调节虚拟励磁电流实现交流电压精准调节,参数适配后其动力学特性可简化为下垂控制;对应仿真脚本VSM.m,增设虚拟阻尼系数Dp、虚拟惯量时间常数τf、虚拟转子惯量J等专属参数,匹配论文图7。
(3)匹配控制:利用功率变流器与同步电机的结构相似性,将直流侧电压作为功率失衡的表征量,经比例系数转换后驱动变流器频率,实现二者微分方程的结构匹配,以直流电流类比同步电机输入转矩控制交流功率,因显式考虑直流侧动态,对直流源饱和具备强鲁棒性;对应仿真脚本matching.m,无额外专属参数,匹配论文图8。
(4)可调度虚拟振荡器控制(dVOC):基于Liénard型振荡器的同步特性设计,是去中心化的构网型控制策略,能保证互联构网型变流器相对标称电压和功率设定点的近全局渐近稳定性,在αβ坐标系下由振荡器动力学表征参考电压动态,在感性电网且接近额定稳态时,频率与有功功率的关系呈现类下垂控制特性,解决了传统虚拟振荡器控制无法指定额定功率注入的问题;对应仿真脚本dVOC.m,增设振荡器增益η、电压调节增益α等专属参数,匹配论文图9。
二、仿真电路结构
仿真电路以标准IEEE9节点辐射型电力系统为基础,核心为节点1接100MVA同步电机+节点2、3各接一组100MVA构网型变流器的混合拓扑低惯量电力系统的研究背景,脚本参数与论文模型设计完全适配,电路参数如下:
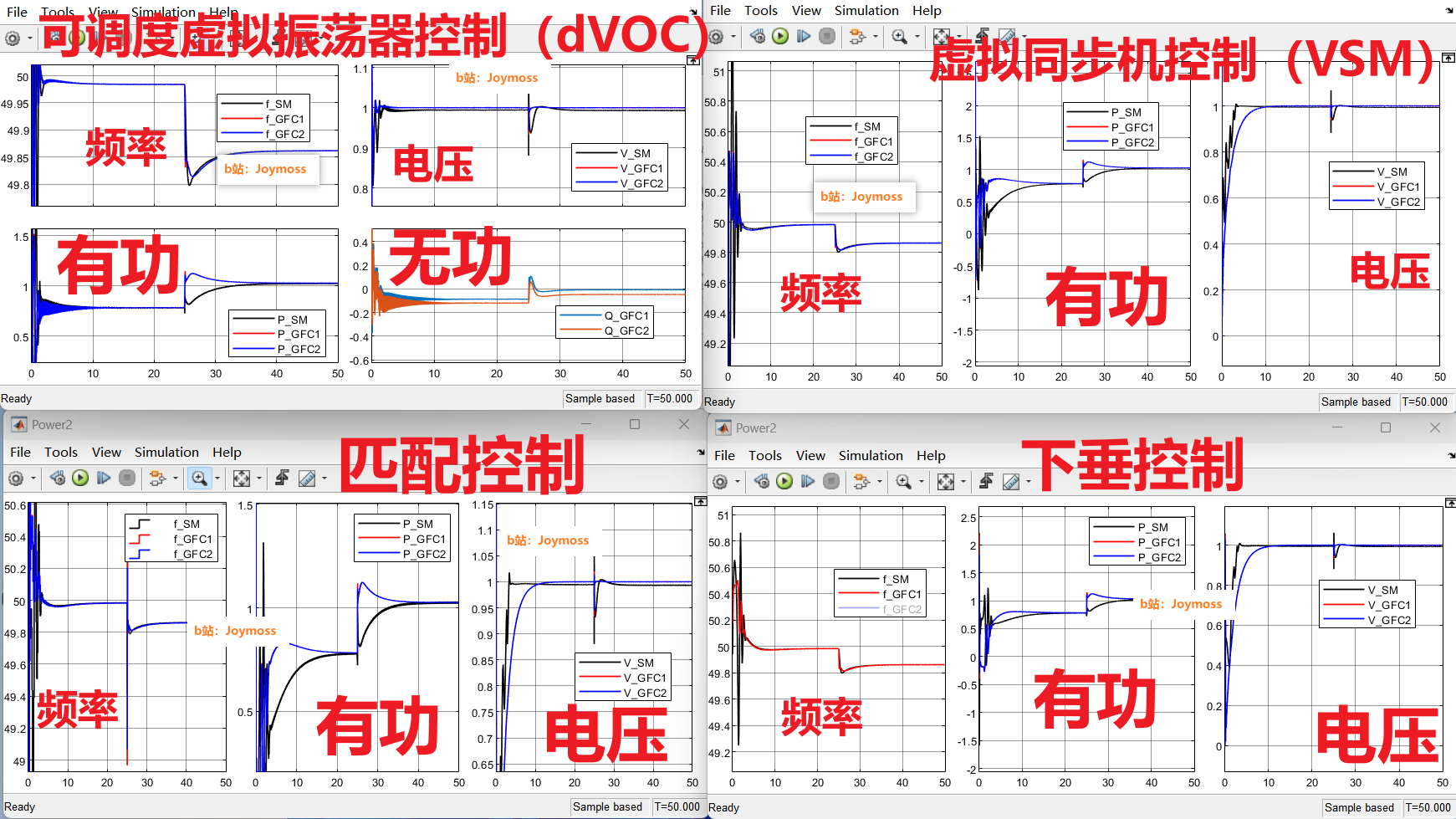
(1)基础参数与仿真配置:以 100MVA、230kV、50Hz 为基准,采样时间Ts=1e−4s、仿真时长 50s;24.5s 启用直流源饱和限制,25s 在节点 7 施加 0.75pu 负荷扰动,2.25pu 基础负荷均匀分布于节点 5、7、9,元件参数均经标幺值结合基准值换算。
(2)电网与发电单元:9 节点经 9 条 RL 参数输电线路连接,节点 4、6、8 设并联补偿电容;节点 1 接 100MVA 同步电机(配套τg=5s 的调速器 - 水轮机一阶动态),节点 2、3 各接 100MVA 聚合式构网型变流器(200 台 500kVA 模块聚合,n=200为变流器参数缩放系数)。