科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本是2021b,使用高于此版本运行!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
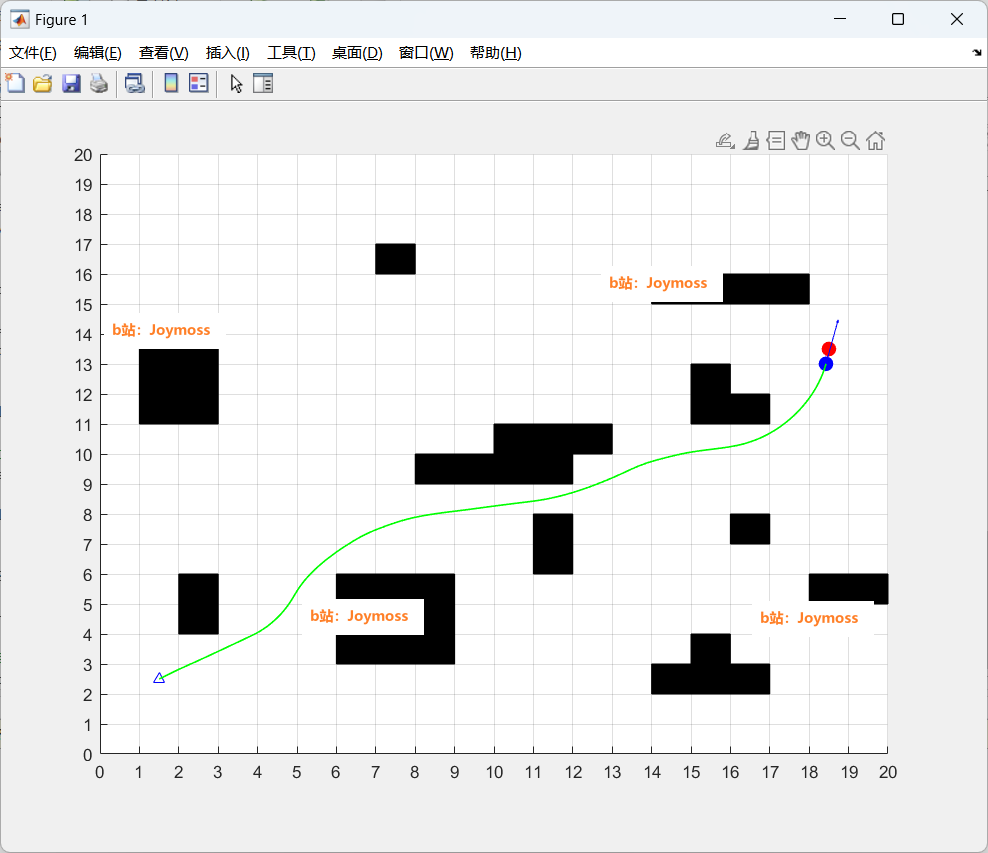
【复现】基于模糊控制改进的动态窗口法(DWA)的复杂环境下移动机器人局部动态避障与路径规划
1.模糊控制改进的动态窗口法(DWA),用于机器人局部动态避障,解决传统 DWA 固定权重适应性差的问题:
2.基础 DWA:通过速度空间采样、轨迹评价(方向 + 安全 + 速度)选最优速度,但固定权重易导致路径曲折、避障不稳。
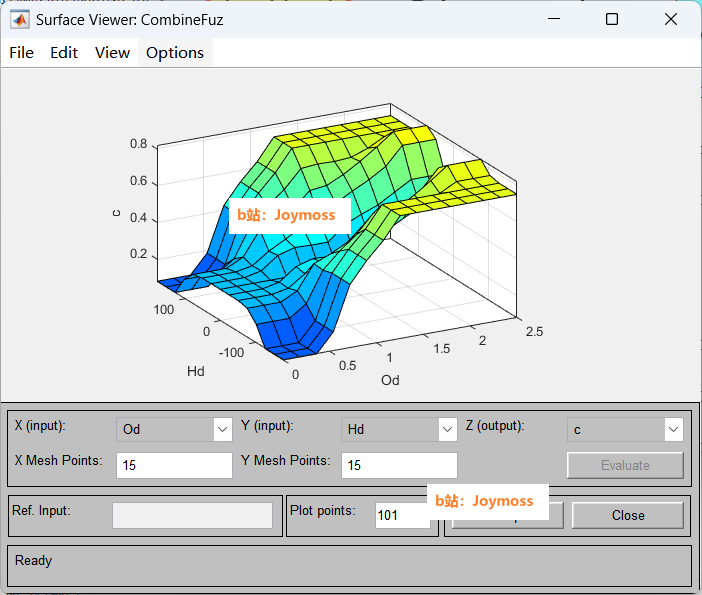
3.模糊改进:设计 3 个模糊控制器,根据机器人与目标 / 障碍的距离、方向角,动态调整 DWA 的三个评价权重。
4.提供复现的论文