科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
(两套代码)基于领航-跟随法+人工势场法(APF)结合的对智能体编队协同控制算法(Matlab实现)
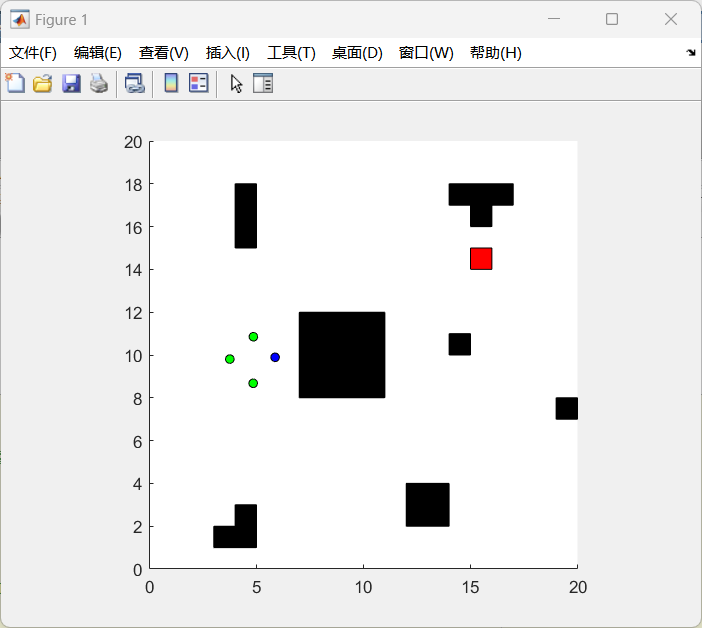
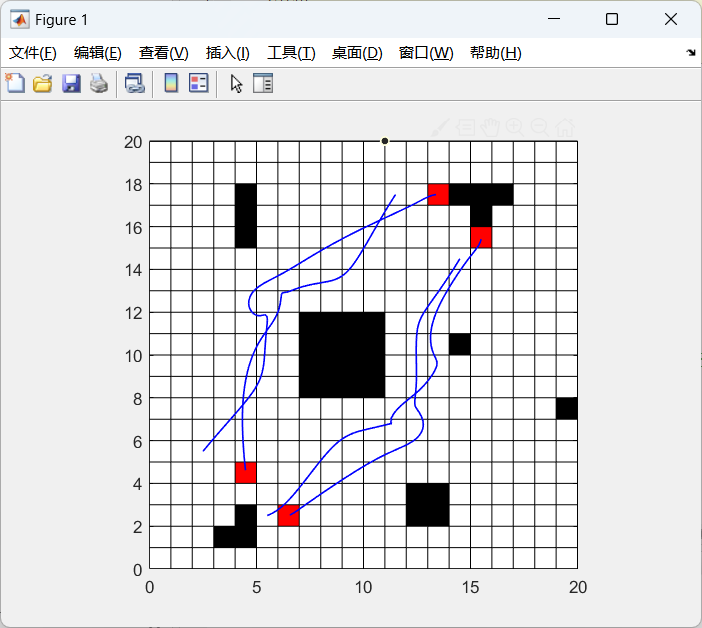
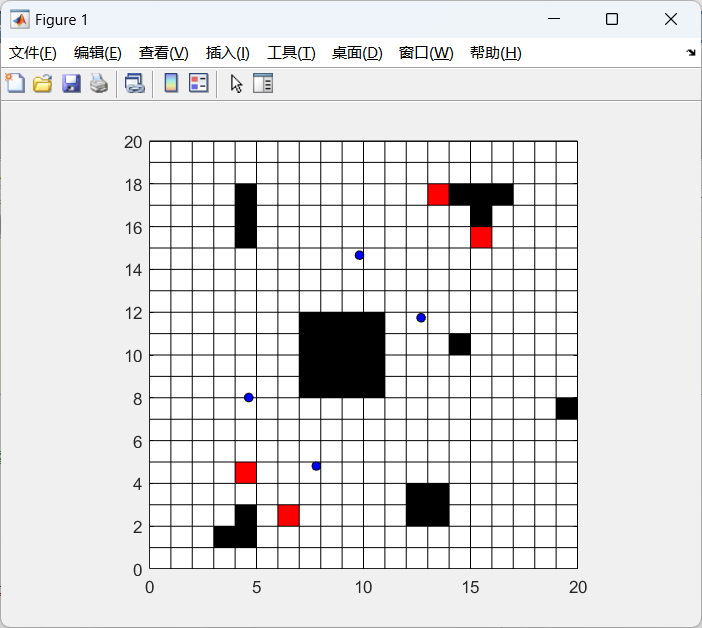
第一套代码基于人工势场法(APF)实现多智能体独立导航,为每个智能体绑定固定目标点,通过目标引力、障碍物斥力和智能体间斥力的合力控制运动,让所有智能体沿规划路径独立抵达各自目标,同时完成地图、障碍物、运动轨迹的可视化展示。侧重多智能体独立抵达目标。
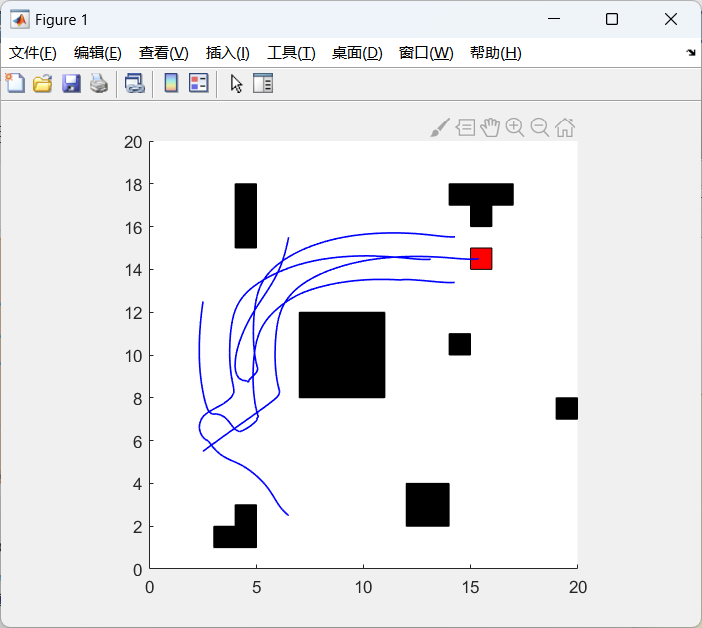
第二套代码采用领航-跟随法+人工势场法融合编队控制,设定领航者、其余为跟随者,领航者按势场法向总目标运动,跟随者围绕领航者动态调整目标点,通过差异化运动参数和编队规则保持队形,最终实现多智能体整体编队行进并完成可视化仿真。