科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
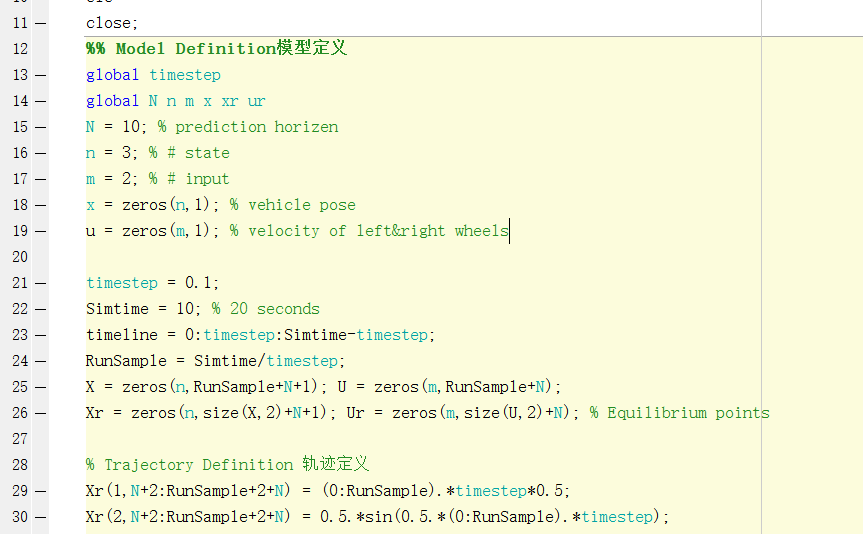
注意:Maltab版本是2018b,高版本直接可运行,低版本可以联系我降版本!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
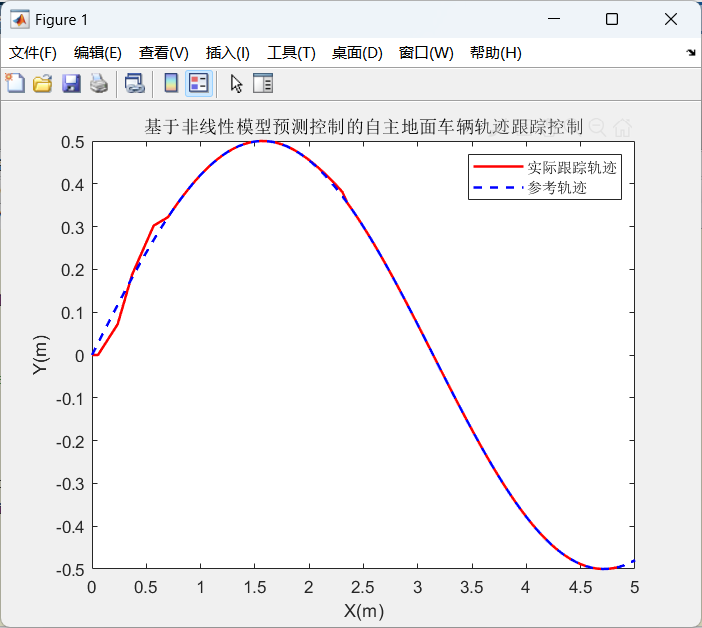
自主地面车辆(AGV)的非线性模型预测控制(NMPC)轨迹跟踪控制
1.针对自主地面车辆(AGV)的轨迹跟踪控制问题,研究了一种基于非线性模型预测控制(NMPC)的方法。
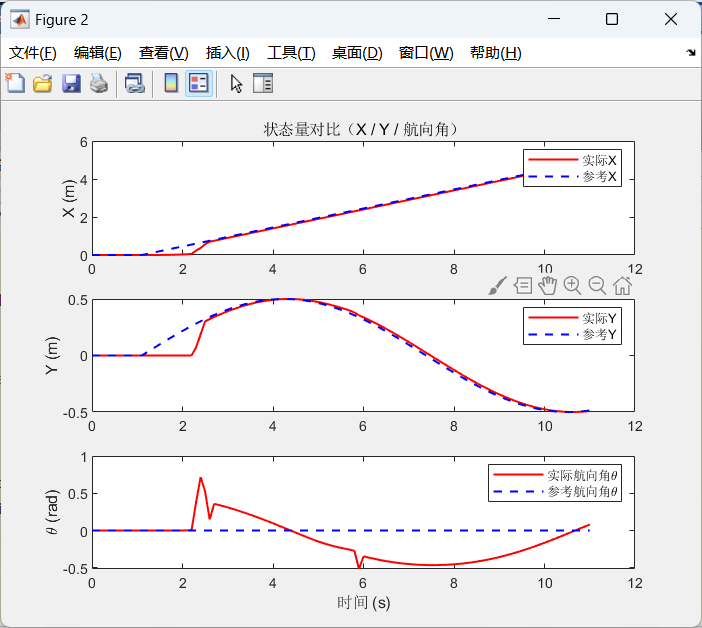
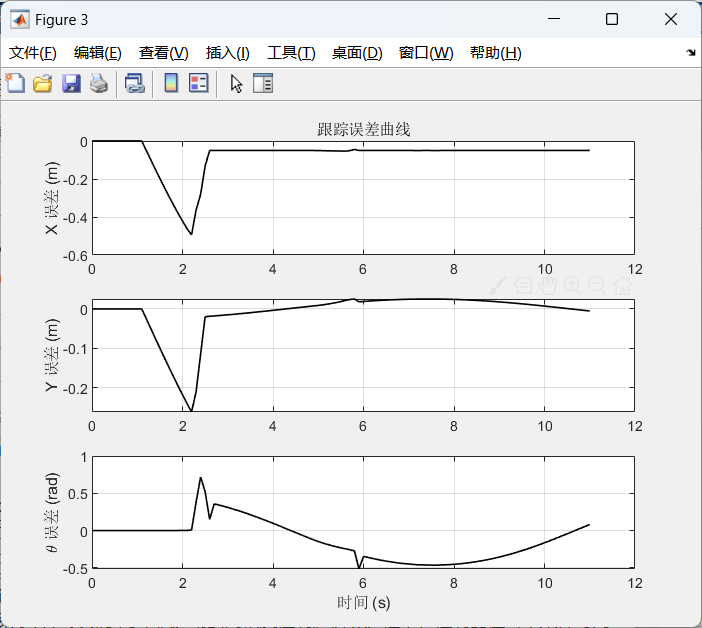
2.该方法以车辆的运动学模型为基础,将轨迹跟踪任务转化为一个滚动时域内的最优控制问题。通过在预测时域内最小化实际轨迹与参考轨迹之间的偏差,并考虑系统状态与控制输入的约束条件,实现了对车辆运动的高精度控制。仿真过程中,控制器在每个采样时刻在线求解一个非线性优化问题,将计算得到的控制量作用于车辆模型,并滚动更新系统状态。
3.仿真结果表明,该方法能够使车辆有效跟踪预设的参考轨迹,具有良好的跟踪精度和稳定性,验证了非线性模型预测控制在自主地面车辆轨迹跟踪中的可行性与有效性。