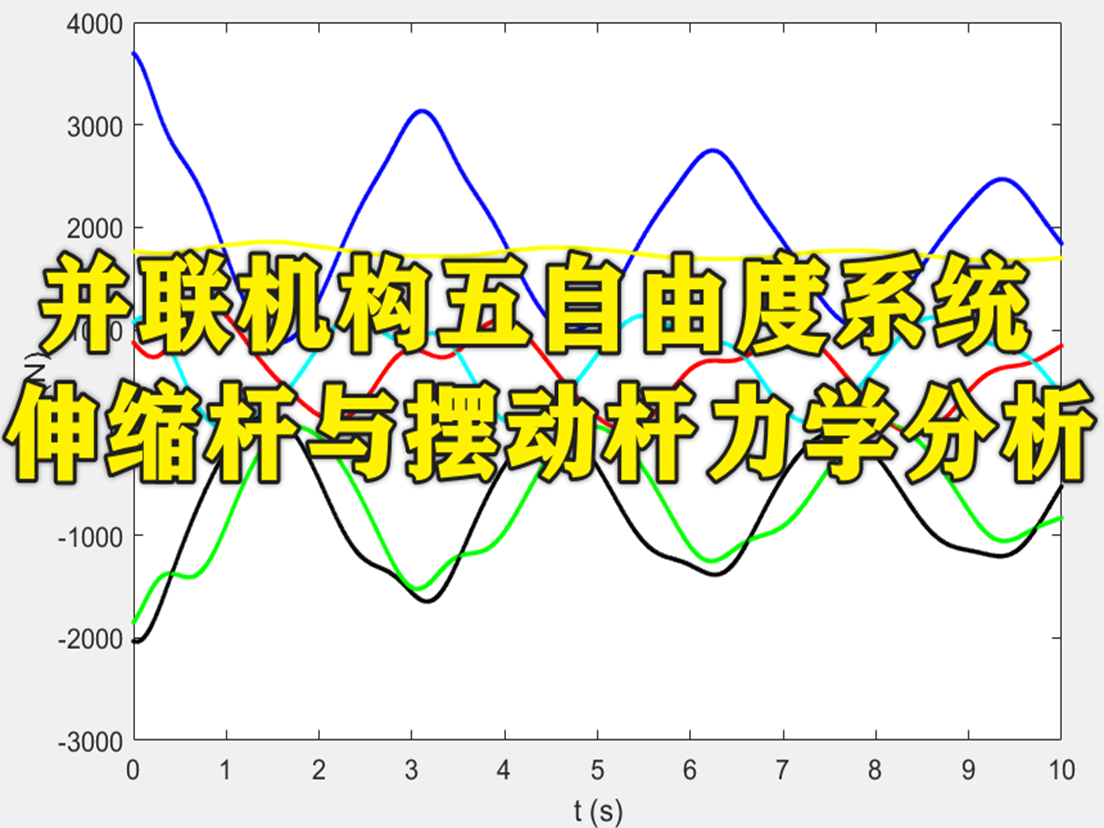
基于Matlab的并联机构五自由度系统伸缩杆与摆动杆动力学分析。主要的程序过程: 欧拉角计算:计算系统的欧拉角,这是描述刚体在三维空间中取向的三个角。 位置和速度计算:计算系统在静坐标系下的位置和速度。 动力学计算:计算系统的动力学参数,包括力、力矩、惯性力矩等。 驱动力计算:计算为了维持系统位姿所需的控制输入(驱动力)。 数据可视化:绘制系统的运动状态和控制输入随时间变化的图像。主要理论模型: 动力学模型:基于牛顿-欧拉方程,考虑了系统的惯性、阻尼和外部力。拉格朗日方程:用于计算系统的角速度和角加速度。 控制系统:通过计算所需的控制输入来维持系统在期望的位姿。数值积分:使用数值方法求解动力学方程,得到系统的运动状态。程序已调通,可直接运行。