在无线通信和阵列信号处理中,波束成形技术通过调整阵列天线各个阵元的加权系数,使天线方向图的主瓣对准期望信号方向,零陷对准干扰方向,从而提升信号接收质量。实现这一目标的前提是准确知道信号和干扰的到达方向。实际环境中,到达方向估计会受到噪声和动态变化的影响,导致估计值抖动。为此,先用卡尔曼滤波器对带噪的到达方向进行平滑和预测,得到更稳定的方向序列;接着利用最小方差无失真响应波束成形器和线性约束最小方差波束成形器,根据估计的方向动态计算阵列权重;最后还引入了基于特征空间的稳健波束成形方法,进一步提升在方向估计误差下的鲁棒性。整个流程在MATLAB中实现,通过仿真数据验证了所提方法在干扰抑制和信号增强方面的优势。
算法步骤
第一步 加载数据与观察带噪方向
从DOA_Data.mat文件中读取期望信号和干扰信号的到达方向原始带噪测量值,并绘制曲线,观察其抖动情况。
第二步 用卡尔曼滤波器平滑到达方向
分别对期望信号方向和干扰方向建立一维状态空间模型,设定状态转移矩阵为1,观测矩阵为1,过程噪声协方差和观测噪声协方差分别设置为0.01和4。通过卡尔曼滤波递推公式,实时更新状态估计,得到去噪后的方向序列。
第三步 计算接收数据的协方差矩阵
利用接收数据矩阵matX(每列为一次快拍采样),计算所有快拍的平均协方差矩阵,并加入对角加载以保证数值稳定性。
第四步 构造期望信号和干扰的导向矢量
将卡尔曼滤波后得到的方向角度(度)转换为弧度,为每个时刻计算期望信号和干扰对应的导向矢量。
第五步 设计并应用两种波束成形器
- 最小方差无失真响应波束成形器:根据当前协方差矩阵和期望信号导向矢量,计算权重向量,使输出功率最小同时保证期望信号方向无失真。
- 线性约束最小方差波束成形器:在期望信号方向增益为1、干扰方向增益为1e-4的约束下,求解权重向量,同时抑制干扰。
- 对每个快拍,分别用两种权重与接收数据做内积,得到期望信号的估计值。
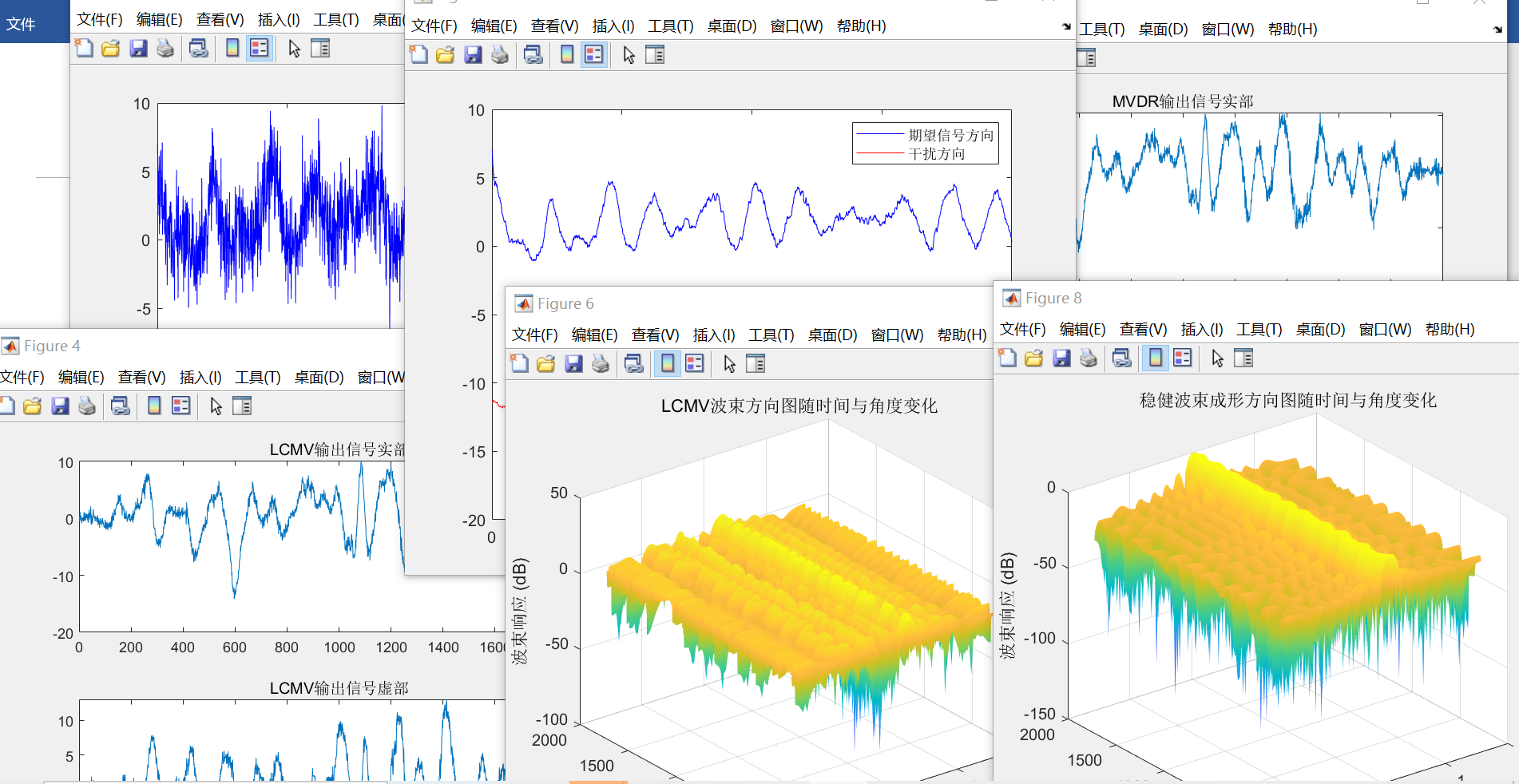
第六步 绘制三维波束方向图
在角度范围-90°到90°内,计算每个时刻不同角度对应的波束响应,分别绘制MVDR和LCMV的三维方向图,观察波束主瓣是否对准期望方向、零陷是否对准干扰方向。
第七步 稳健波束成形
采用特征空间方法,对协方差矩阵进行特征分解,根据特征值大小区分信号子空间和噪声子空间。利用信号子空间重构干扰加噪声协方差矩阵,再以此计算权重,得到更稳健的期望信号估计,并绘制其三维波束方向图。
第八步 保存结果
将去噪后的方向、稳健波束成形输出的信号估计等保存到MAT文件中。