科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
两车交互场景下自主车辆运动规划算法(智能驾驶、减速避撞与换道):基于深度学习轨迹预测与模型预测算法结合
1.深度学习轨迹预测与模型预测控制融合的自主车辆运动规划算法,以车车交互场景为研究对象,通过将目标车辆(TV)的深度学习轨迹预测结果嵌入自车(EV)MPC 的安全约束,构建风险感知的无碰撞运动规划框架
2.代码实现思路:
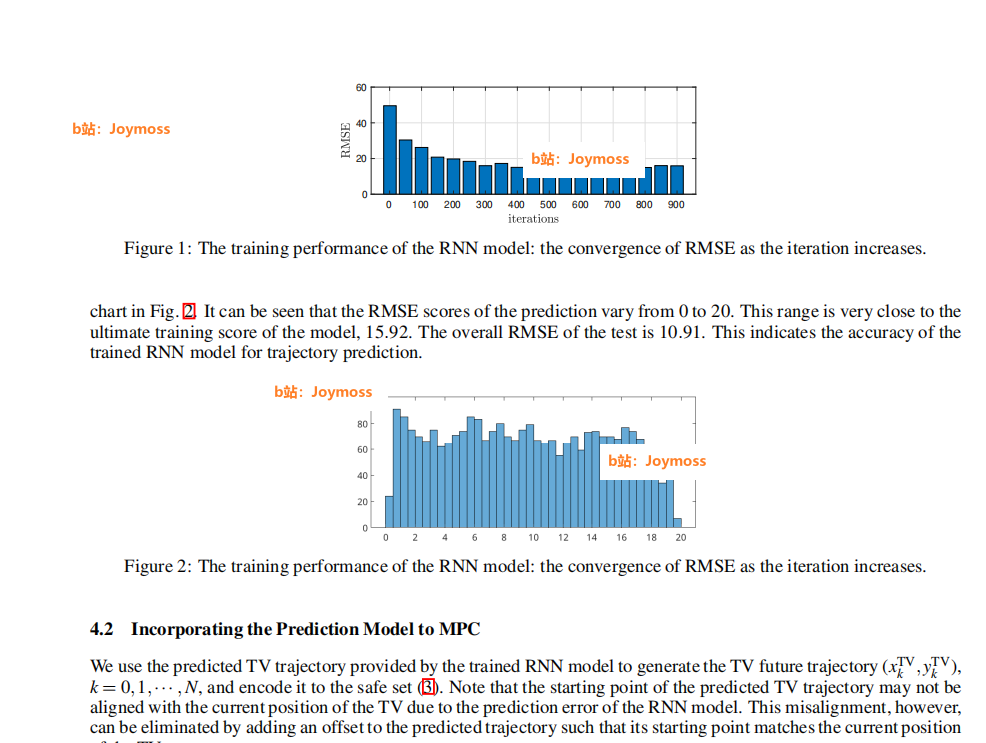
(1)目标车辆轨迹预测模块:针对换道场景构建车辆轨迹数据集,采用GRU-RNN 时序预测模型,基于目标车辆历史轨迹序列实现未来轨迹的时序预测;通过数据校准消除样本坐标偏移、轨迹偏移补偿修正预测起点误差,提升预测结果的有效性与准确性。
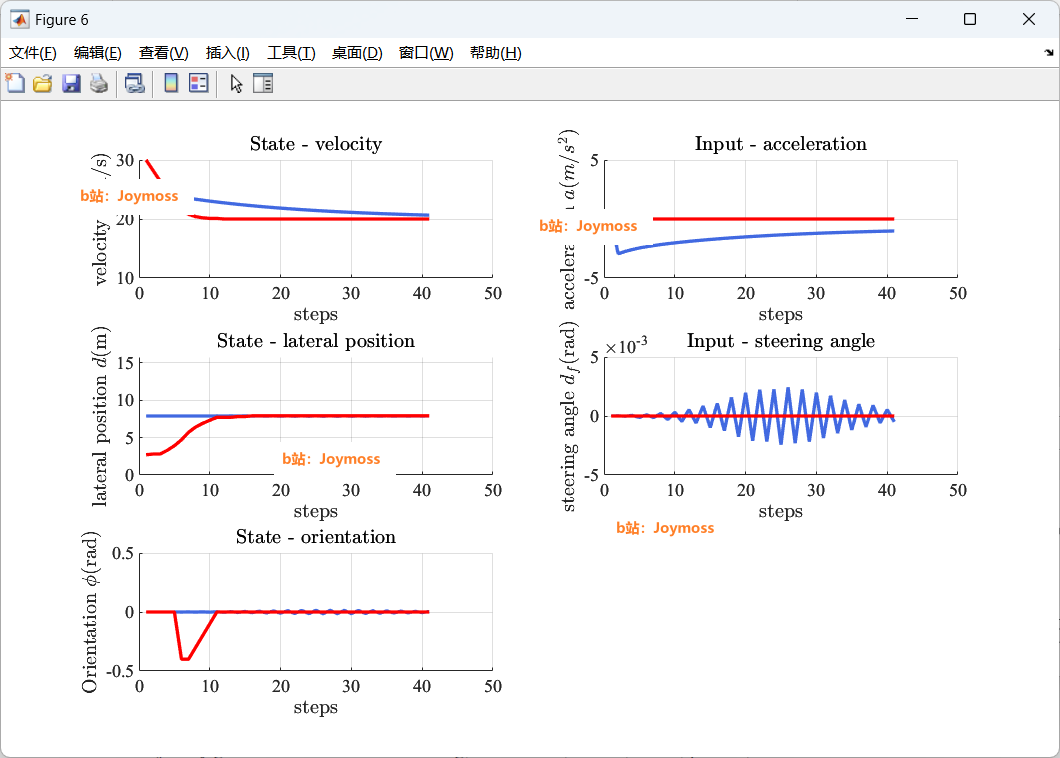
(2)自车模型预测控制模块:基于线性化离散化运动学自行车模型建立自车状态方程,以参考轨迹跟踪与控制输入优化为目标函数,引入道路边界、车辆物理特性、控制输入可行域等约束,并新增基于目标车辆预测轨迹的椭圆避撞安全约束,将目标车辆预测位置作为椭圆中心,自车状态需满足椭圆域外的距离约束,形成带风险感知约束的 MPC 最优控制问题,通过滚动优化迭代求解最优控制序列。
(3)两车规划算法:将经偏移补偿的目标车辆预测轨迹,直接编码为自车 MPC 的安全约束,实现深度学习轨迹预测与模型预测控制的深度耦合,使自车运动规划实时纳入目标车辆的运动趋势,实现车车交互下的风险感知决策。
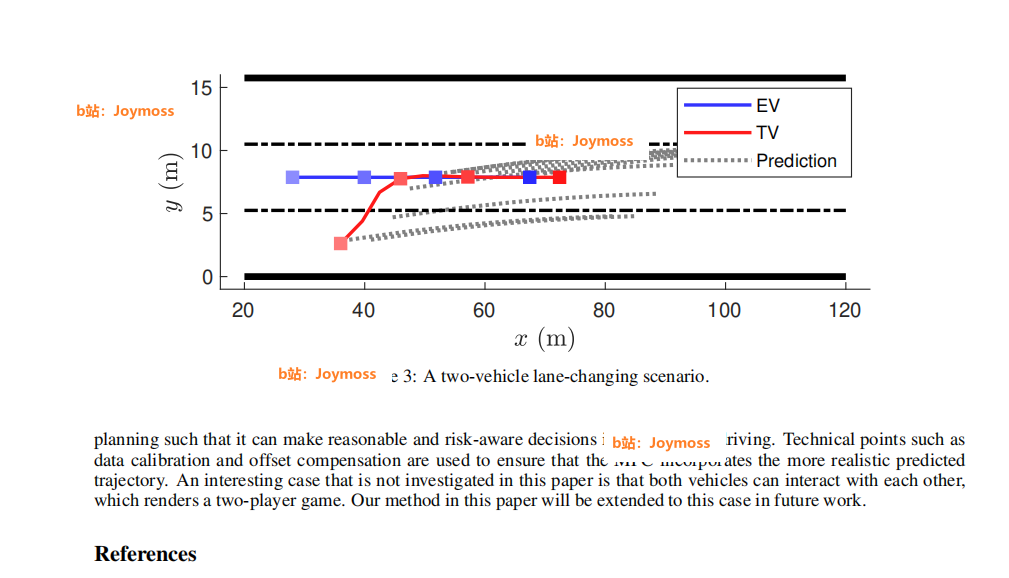
3.仿真验证结论:以双车道高速公路车车交互换道场景为验证场景(自车行驶于中间车道,目标车辆从外侧车道换入中间车道,存在潜在碰撞风险)开展仿真,验证结论如下:
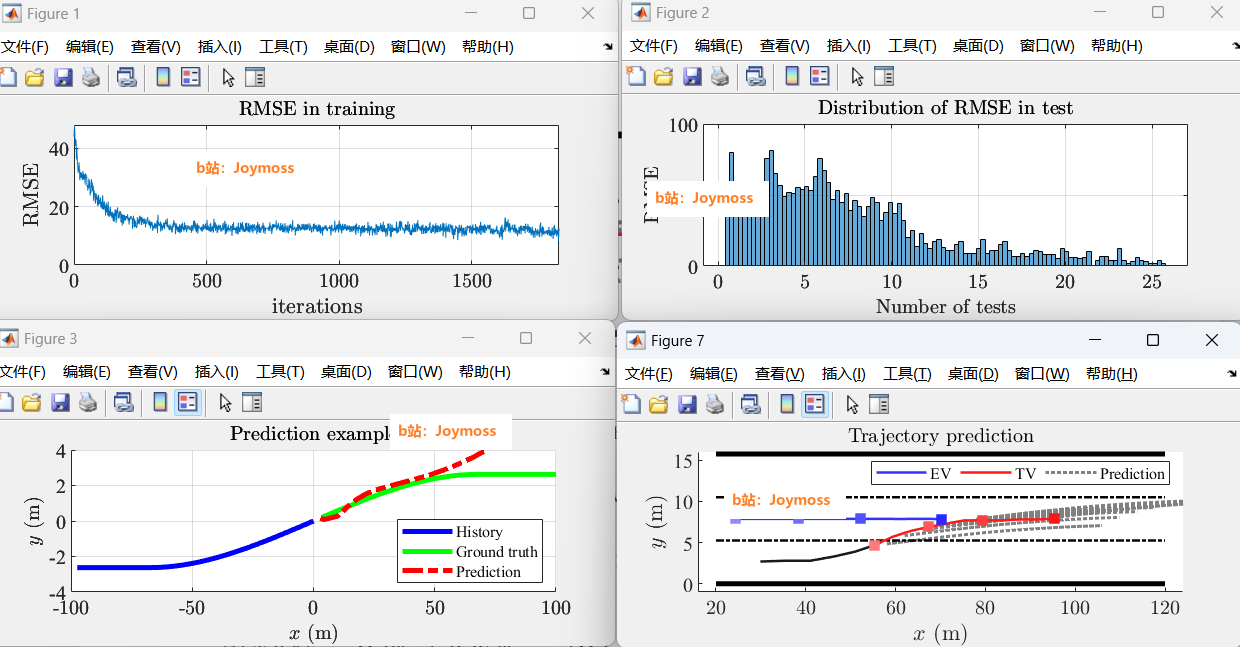
(1)GRU-RNN 预测模型收敛性与精度良好,训练集 RMSE=15.92、测试集 RMSE=10.91,可精准捕捉 TV 换道时序特征,满足实时控制需求;
(2)算法具备有效的风险感知与无碰撞规划能力,可使 EV 根据 TV 预测轨迹主动减速避撞、换道完成后平滑回归参考状态,且随 TV 历史数据累积,预测轨迹贴合度提升,避撞决策更精准。
4.文献:《Incorporating Target Vehicle Trajectories Predicted by Deep Learning into Model Predictive Controlled Vehicles》