科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
基于改进自适应蚁群算法(MAACO)的移动机器人路径规划算法:二维障碍环境+非均匀初始信息素分布
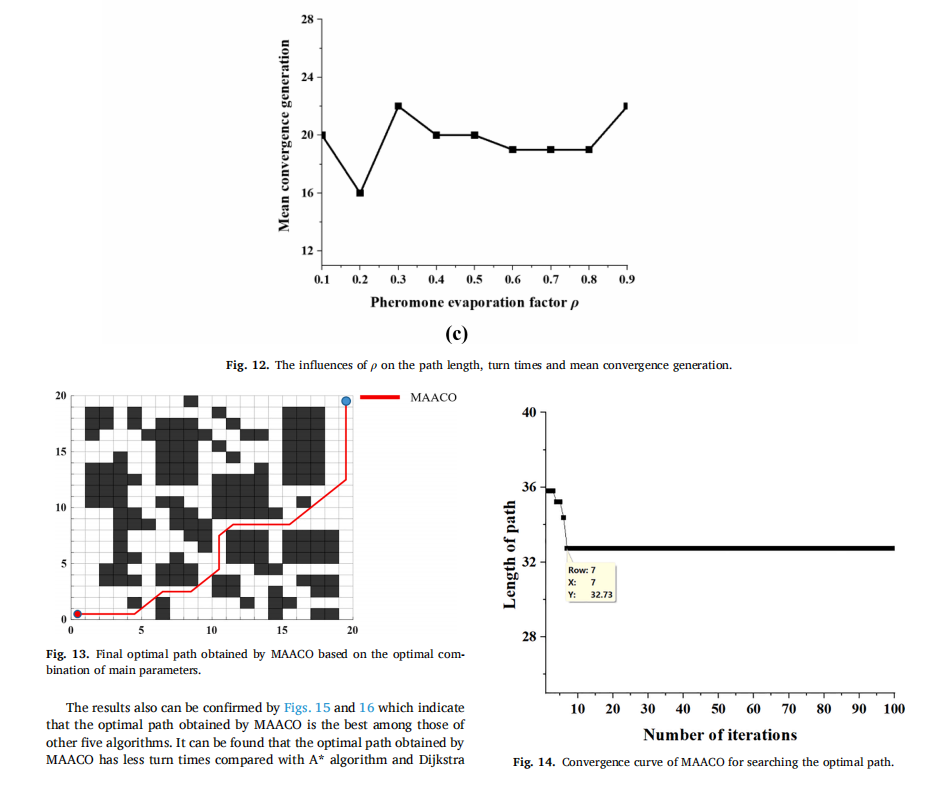
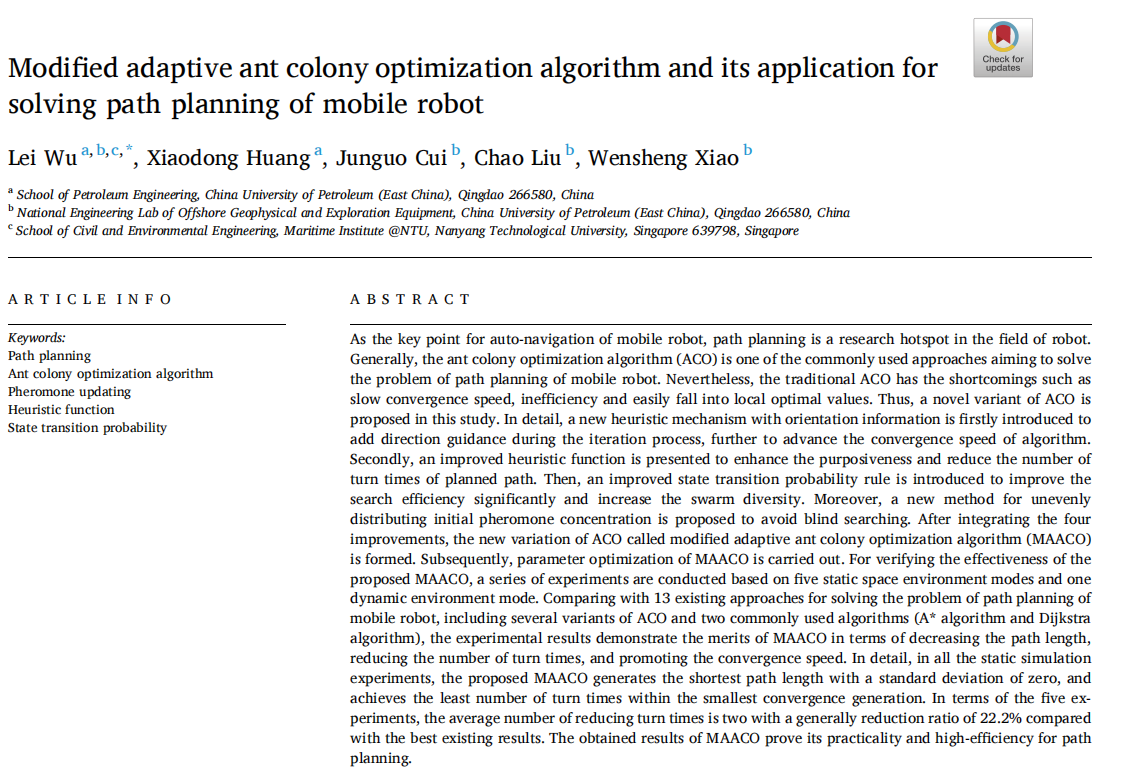
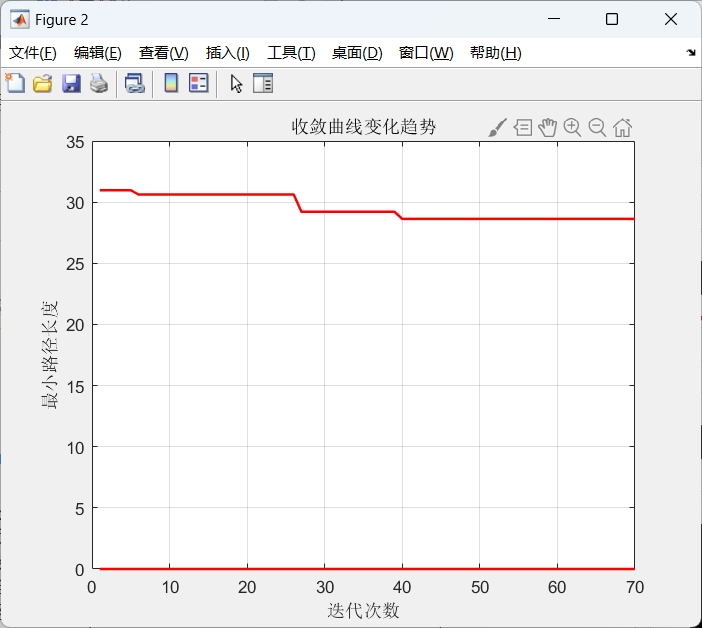
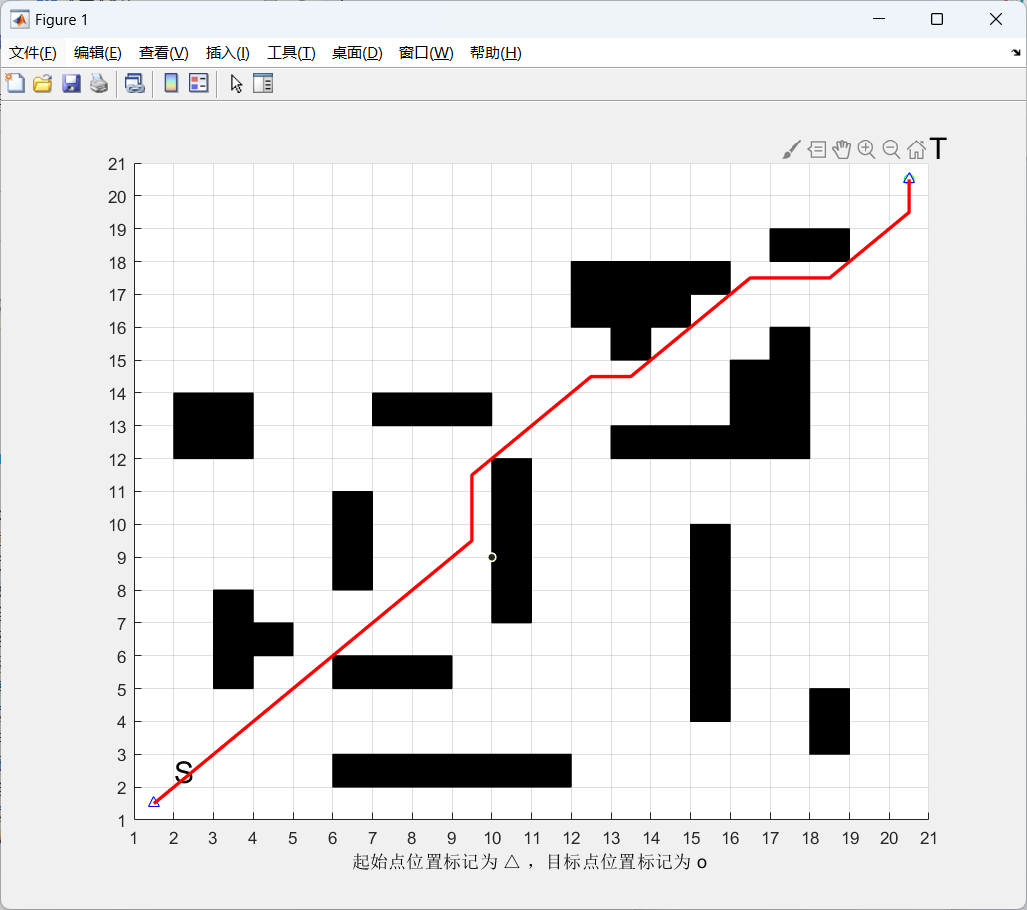
1.文献《Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot》。实现了论文中提出的改进自适应蚁群算法(MAACO)的核心思想,旨在解决传统蚁群算法在移动机器人路径规划中存在的收敛速度慢、搜索效率低、易陷入局部最优等问题。代码通过非均匀分布初始信息素,使靠近起点-终点连线的栅格获得更高的初始浓度,从而引导蚂蚁在早期搜索中更具方向性;同时采用方向信息启发机制,在节点选择时引入方向约束以减少无效探索;此外,结合改进的状态转移概率规则和轮盘赌选择策略,在加速收敛的同时保持种群多样性;最终通过全局信息素挥发与增强机制,使优质路径(短路径)获得更多信息素正反馈。这些改进策略共同作用,使算法能够在静态栅格环境中规划出路径更短、转弯次数更少、收敛速度更快的全局最优路径,验证了论文所提MAACO算法的有效性和优越性。
2.栅格环境建模:通过二维矩阵定义自由栅格(0)与障碍栅格(1),将实际空间离散化为节点,为蚂蚁移动提供可行状态空间。
3.非均匀初始信息素分布:对每个自由栅格,根据起点到终点的直线距离、起点到当前栅格距离、当前栅格到终点距离的比值,赋予不同初始信息素浓度,使靠近起点 终点连线的区域获得更高初始信息素,引导早期搜索方向。
4.状态转移概率与轮盘赌选择:基于当前节点到各候选节点的信息素浓度与启发信息(到目标点距离倒数的平方)的乘积计算转移概率,再通过轮盘赌随机选择下一步节点,平衡探索与开发。
5.禁忌表与邻接矩阵动态更新:每只蚂蚁维护禁忌表记录已访问节点,同时动态更新邻接矩阵,将已访问节点的连接边置零,确保路径无重复且符合障碍约束。
6.信息素全局更新与挥发:每代所有蚂蚁完成搜索后,先对所有边上的信息素乘以挥发系数实现挥发,再为每只蚂蚁在其路径上增加信息素,增加量与路径长度成反比(Q/路径长度),从而强化优质路径的正反馈作用。