科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
基于KVLCC2船舶MMG操纵模型和LOS导引律的无人船路径点跟踪控制Matlab代码
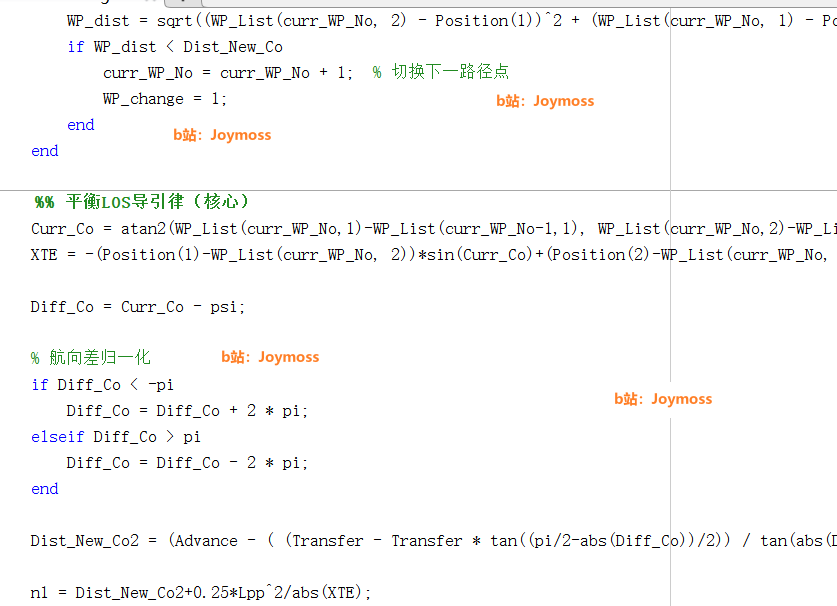
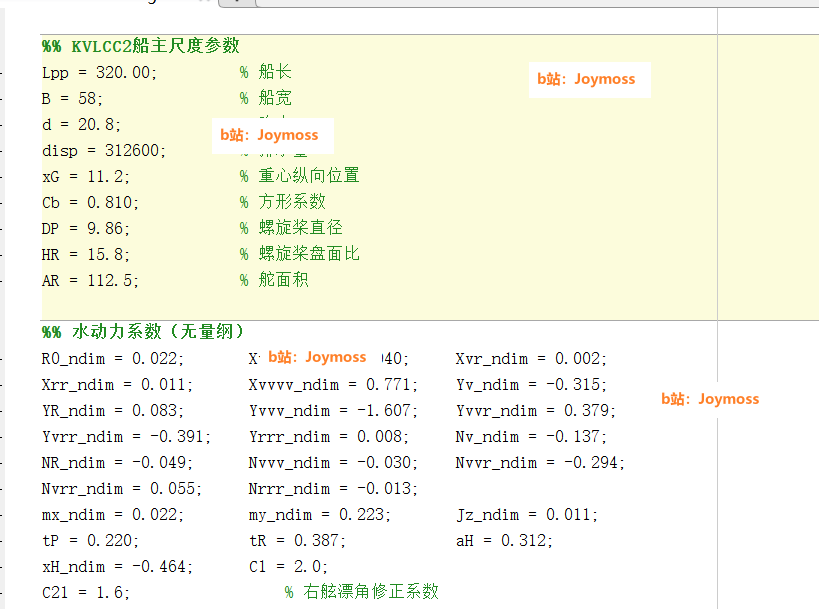
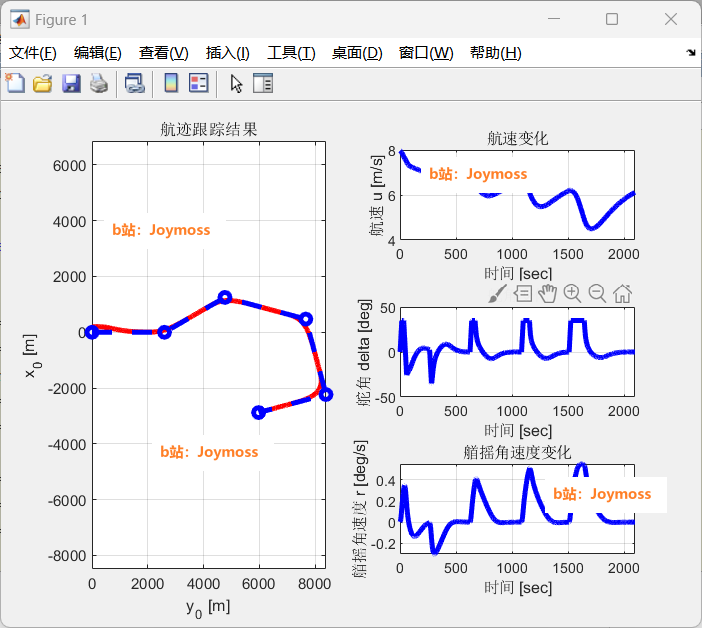
1.以KVLCC2船舶MMG操纵模型为运动基础,仿真无人船的水动力与操纵特性,采用 LOS 导引律实现路径跟踪,考虑横向误差以及船舶操纵性:通过实时计算船舶与目标路径的横向误差,动态生成前方虚拟导引点并输出期望航向,再利用 PD 控制器根据航向误差输出受限舵角,构成导引-控制 - 运动的闭环,让船舶持续向目标路径靠拢。
2.路径点能够自主切换逻辑,船舶靠近当前目标点时自动切换下一航路点,满足舵角幅值、转向速率等约束,在兼顾船舶操纵动力学特性的同时,依靠 LOS 的误差修正能力和控制器的稳定调节能力,实现无人船对预设航路的高精度、平稳跟踪。
3.代码有详细中文注释,保姆级别注释,附赠相关文献