获取完整数据和代码,请直接加
kang20224
机械设备,比如电机、风机、机床啥的,用久了都会慢慢老化,特别是那些转动的零件,比如轴承、齿轮,磨损到一定程度就可能突然坏掉,导致整个机器停机,甚至出事故。所以,如果能提前知道它啥时候会坏,就能提前安排维修,省时省钱还安全。
那怎么知道它快坏了呢?通常会在设备上装个振动传感器,就像给机器把脉一样。机器健康的时候,振动信号是平稳的;一旦开始有故障,振动就会变大,出现一些异常波动。我们最常看的两个指标是均方根值(代表振动的平均能量)和最大值(代表冲击的剧烈程度),这两个数会随着故障发展慢慢变大。
但是,光看数据还不够,因为机器的退化是有规律的,比如一旦开始坏,坏的速度会越来越快,不可能越坏越慢。这种规律就是物理知识。传统的纯数据驱动模型可能会学出违反常识的结果,比如预测退化速率忽快忽慢。所以,想了个办法,把物理规律塞进神经网络里,强迫模型按物理常识来预测,这就是物理信息神经网络(PINN)。同时,为了让预测更稳、更准,训练了好几个不同脑回路(不同结构和初始化)的模型,把它们的结果汇总起来,少数服从多数,这就是集成学习。
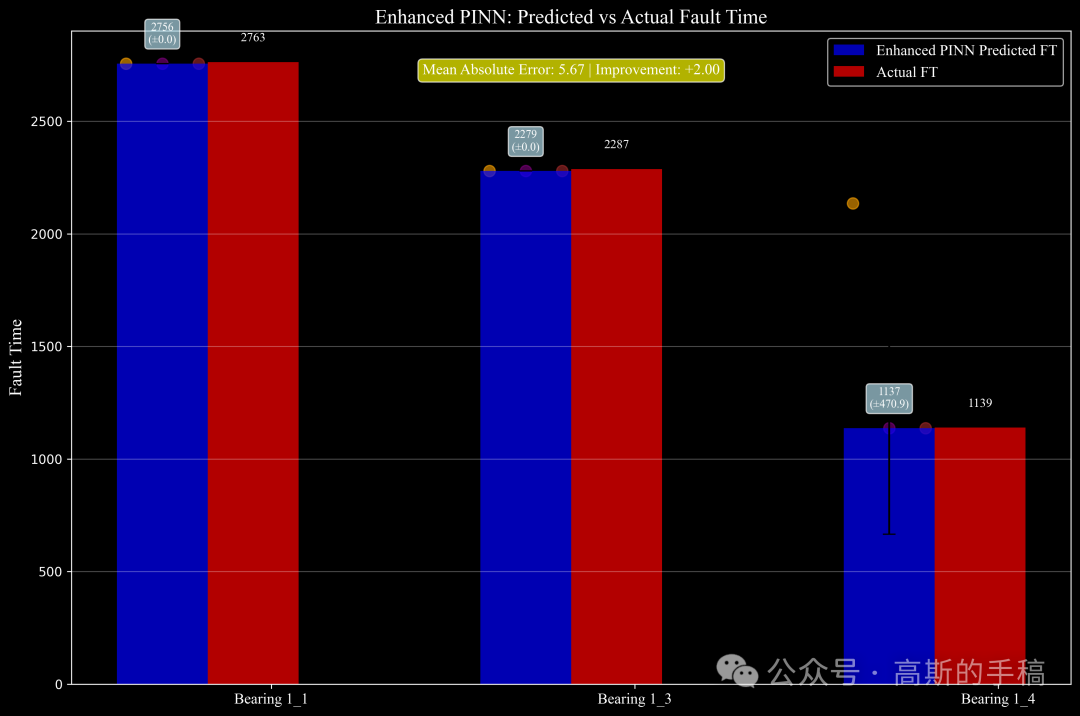
这个算法说白了就是:提取出2个关键健康指标(RMS和最大值);然后用一堆加了物理常识(比如“越坏越快”、“不会自我修复”)的神经网络来学习机器老化的规律;为了不让结果太随意,同时训练好几个不同想法的模型,最后把它们的结果取个中间值,得出机器的剩余寿命。实际测试下来,预测误差只有几个时间步,而且大部分情况下几个模型的看法高度一致,说明方法既准又稳。
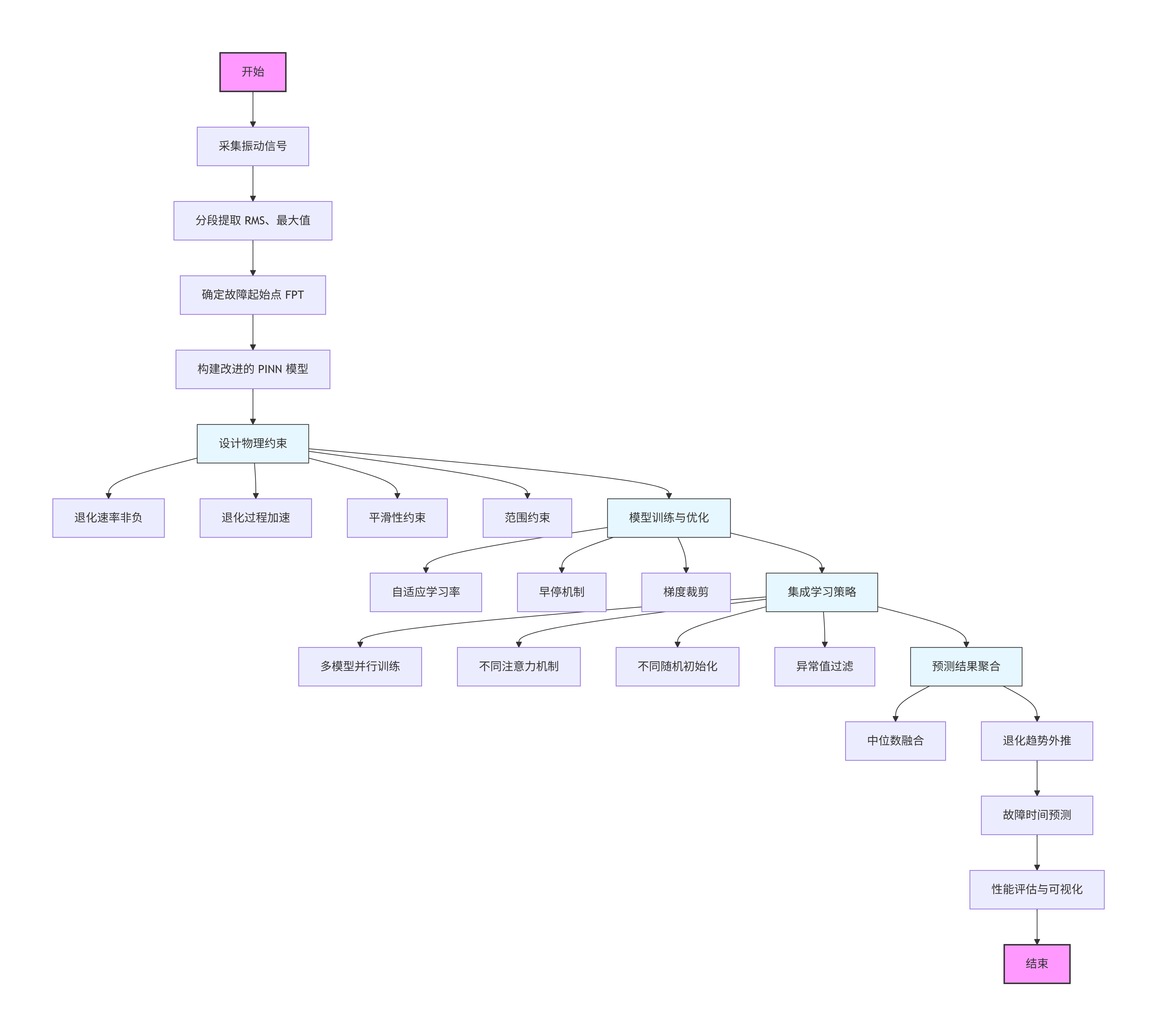
算法步骤
准备数据:先采集机器振动信号,把信号切成一段一段的,每段都算出两个关键指标——均方根值(RMS)和最大值(Max),这样就得到了一串随时间变化的退化特征曲线。
找到故障起点:根据经验或者数学方法,找出机器开始明显变差的那个时间点。比如,振动值突然持续走高,我们就把它定为“故障起始点”(FPT),后面的数据才用于训练模型。
搭建物理信息神经网络:设计一个深度神经网络,里面加了注意力机制,让它能记住长时间的趋势。关键是在损失函数里加了物理惩罚项:比如,要求预测的退化速率不能是负数(不能越变越好),退化加速度必须非负(坏得越来越快),退化曲线要平滑(不能忽上忽下)。如果模型预测违反这些规则,就扣分。
训练模型并优化:用自适应学习率(根据训练情况自动调整步长)和梯度裁剪(防止梯度爆炸)来稳定训练。同时用早停机制——当验证集误差不再下降时就停止,防止模型死记硬背、过度拟合。
搞集成学习:并行训练多个模型,每个模型用不同的随机初始化、不同的注意力结构,让它们各有各的“性格”。这样它们犯的错误也会不一样,方便后面取长补短。
合并预测结果:用训练好的几个模型分别对未来进行预测,先检查每个预测值是不是异常离谱(比如突然跳得特别高),把异常值过滤掉,然后用剩下的结果取中位数作为最终预测值。中位数比平均数更抗干扰,不容易被个别离谱模型带偏。
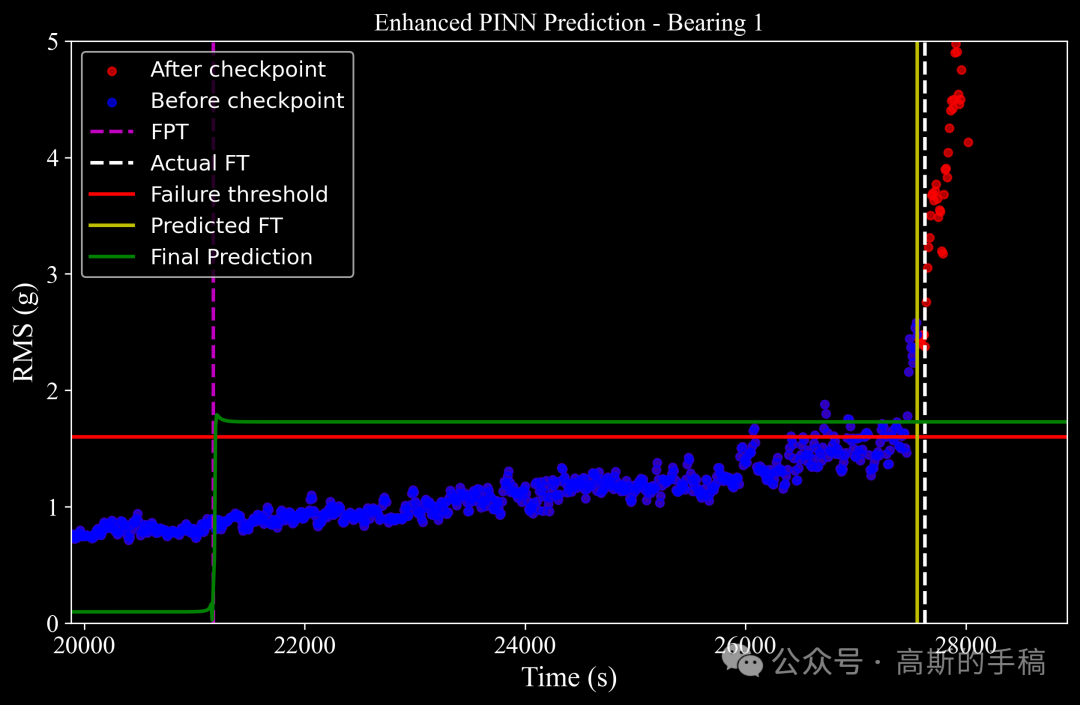
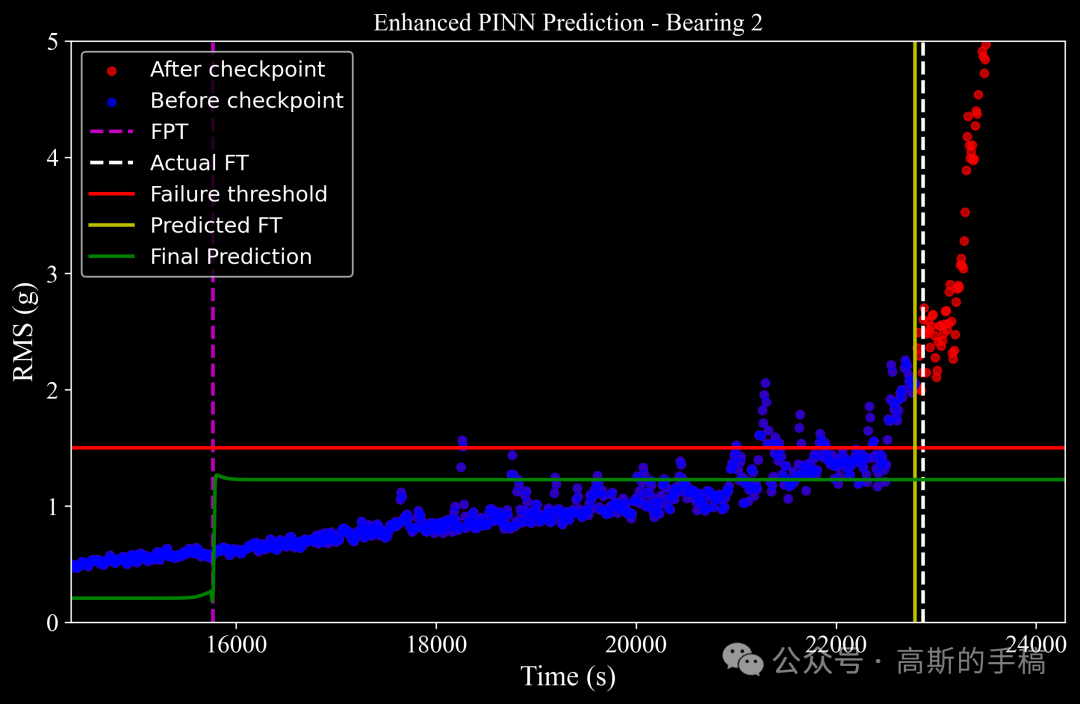
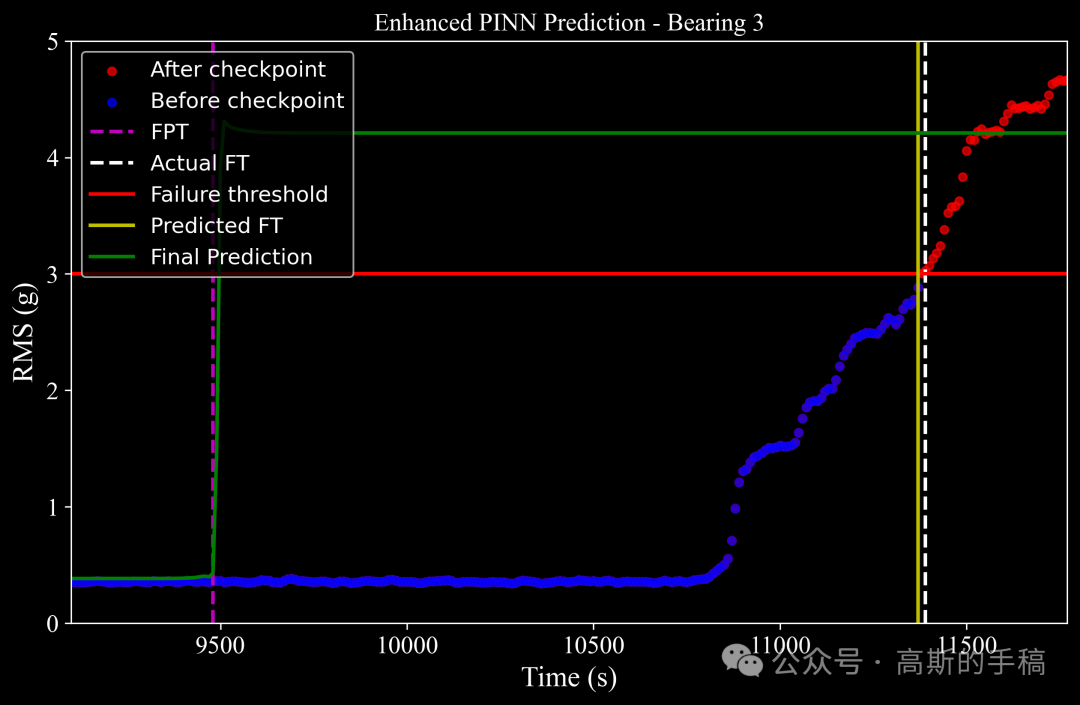
算剩余寿命:拿着最终的预测曲线,看它什么时候超过我们设定的安全阈值。从当前时刻到超过阈值的那一天,就是机器还能正常干活的时间(剩余使用寿命)。
画图验证:把预测的退化曲线和实际记录对比,计算预测误差,画成直观的图表,方便判断模型好不好用。