付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行无水印)
1.功能介绍
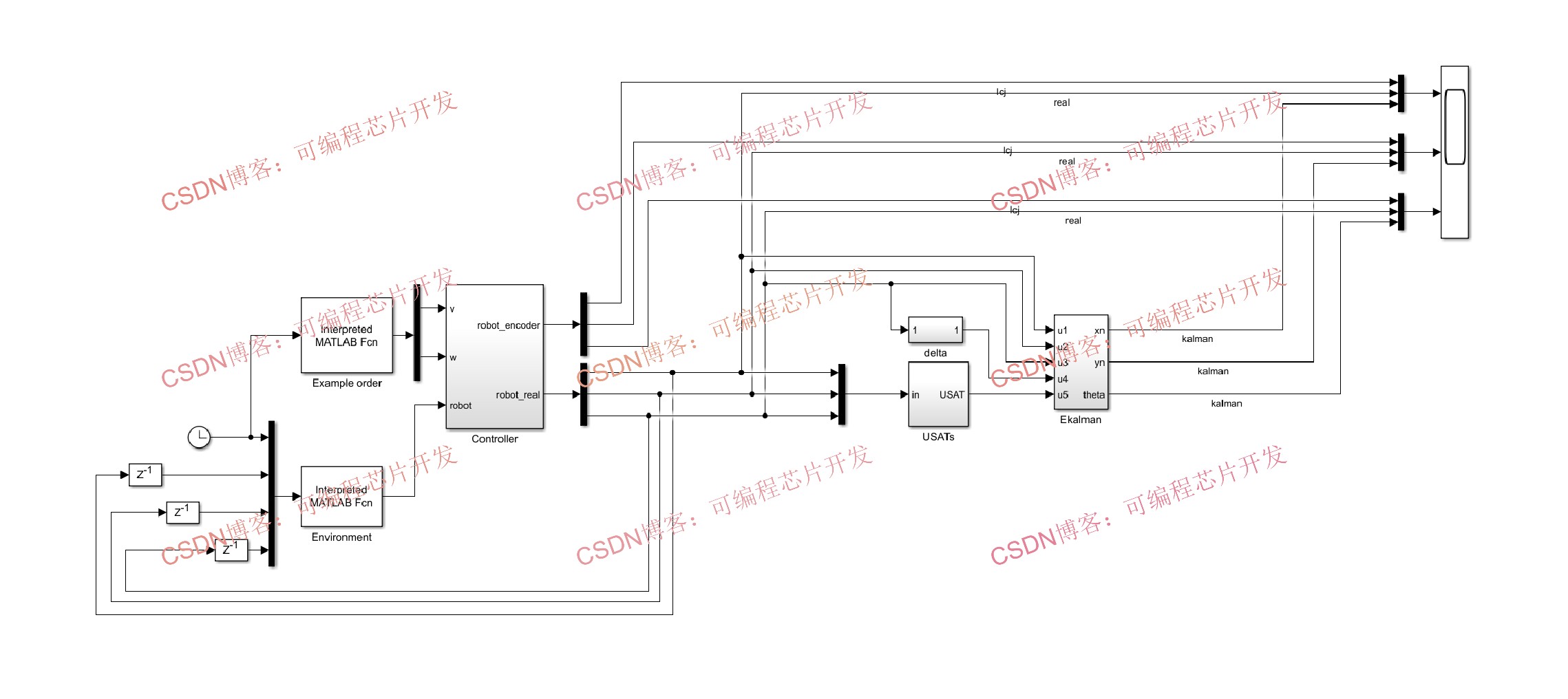
本算法以扩展卡尔曼滤波(EKF)为核心,融合小车编码器(里程计)与环境感知传感器信息,解决非线性运动模型下的定位问题。小车运动存在非线性特性,标准卡尔曼滤波(KF)无法适用,EKF通过一阶泰勒展开将非线性系统 线性化,结合传感器融合实现状态估计;同时引入饱和限制(USAT)保证控制输入合理性,最终输出小车精准的位姿(位置、角度)。
2.使用版本
matlab2024b
3.本作品包含内容
项目工程源文件/完整程序,程序操作方法视频,说明文档,matlab软件下载链接
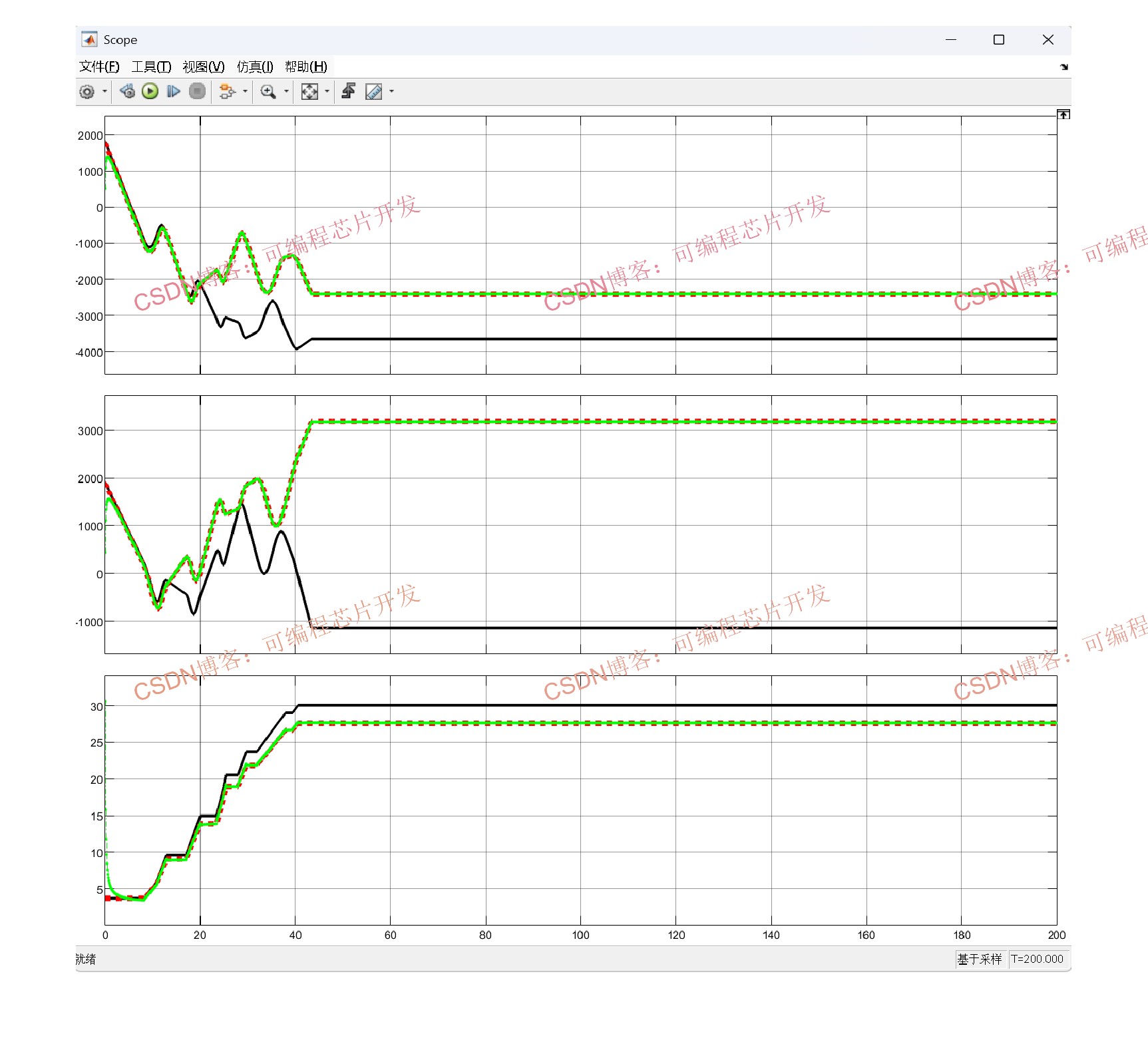
4.仿真测试效果截图