科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
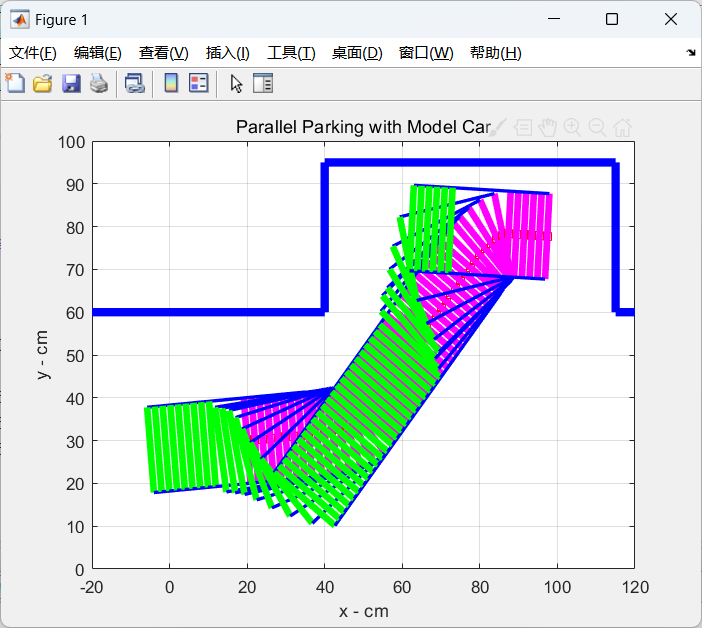
基于模糊逻辑的平行泊车运动控制、倒车入库控制Matlab代码实现
1.简化的四轮车辆运动学模型,以后轴中心位置(x, y)和车身倾角(phi)为状态,恒定车速v,前轮转向角(theta)为控制输入。运动更新方程离散化,模拟低速泊车行为。
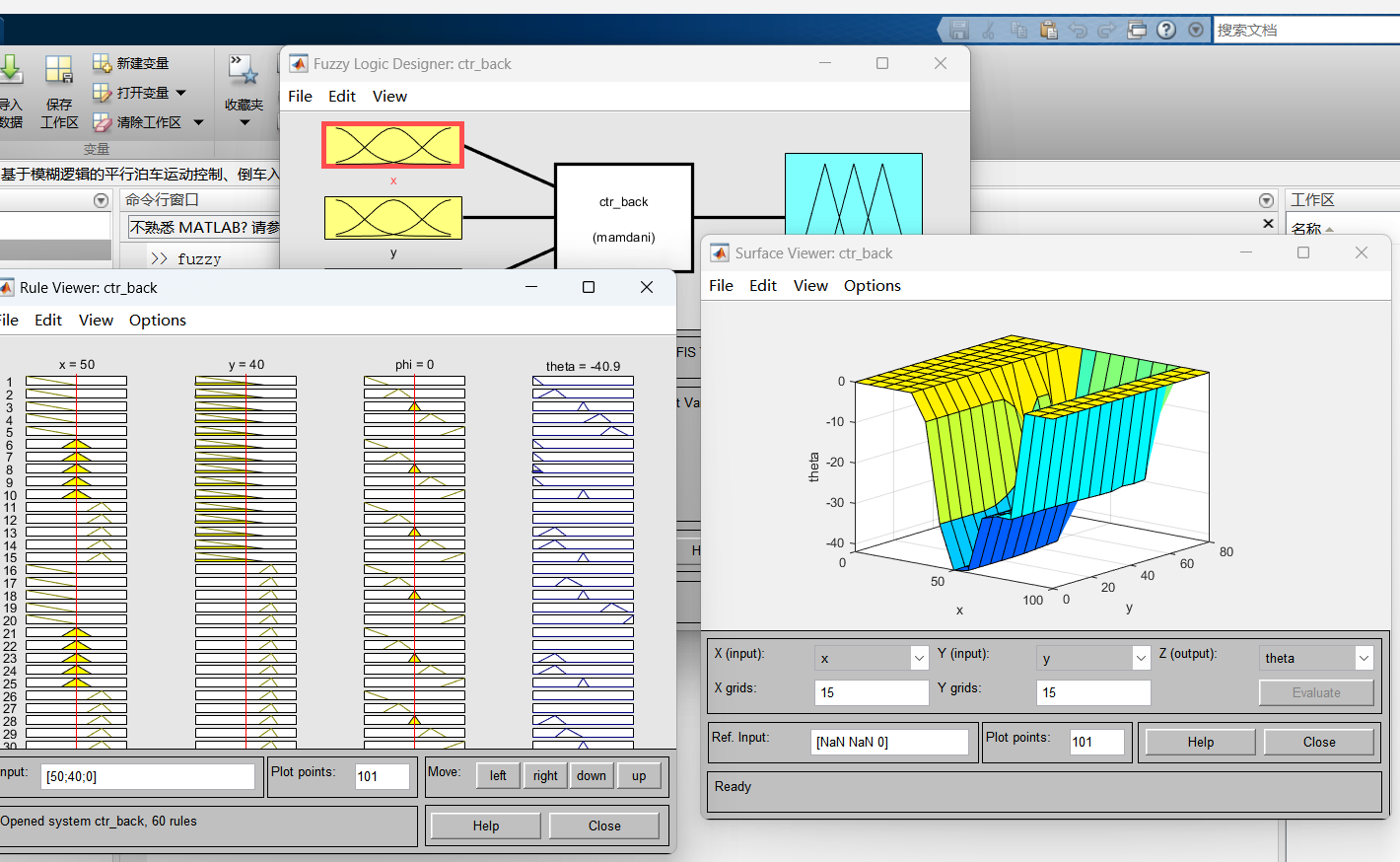
2.采用模糊逻辑控制器,根据模糊规则(car_parking.fis)实时将当前(x, y, phi)映射为转向角theta。无需精确建模,依赖经验规则实现闭环反馈控制。
3.给定初始状态,每采样周期调用模糊推理计算theta,更新车辆状态,并判断是否超出预设区域(x≥100或y≥90)以提前终止。
4.每步动态绘制车辆轮廓(四角连线)和固定车位边界,后轴中心以红点标记,实时展示泊车轨迹与控制器效果。