该方案旨在结合惯性测量技术与MATLAB强大的数据处理能力,设计一套适用于动感单车(Spinning Bike)的骑行姿态识别系统。系统核心在于利用多传感器数据重建人体姿态,识别“站立”、“坐姿”、“蹬踏力度”等关键动作,并实时反馈。🏋️ 核心应用场景
- 姿态纠正:监测膝关节角度,预防损伤。
- 功率估算:通过姿态推算单车功率输出。
- 动作评估:识别站立爬坡、坐姿爬坡、冲刺等不同训练模式。
🛠️ 技术栈与工具
- MATLAB:数据处理、特征提取、模型训练。
- 传感器:MPU6050(加速度/陀螺仪)、柔性姿态传感器。
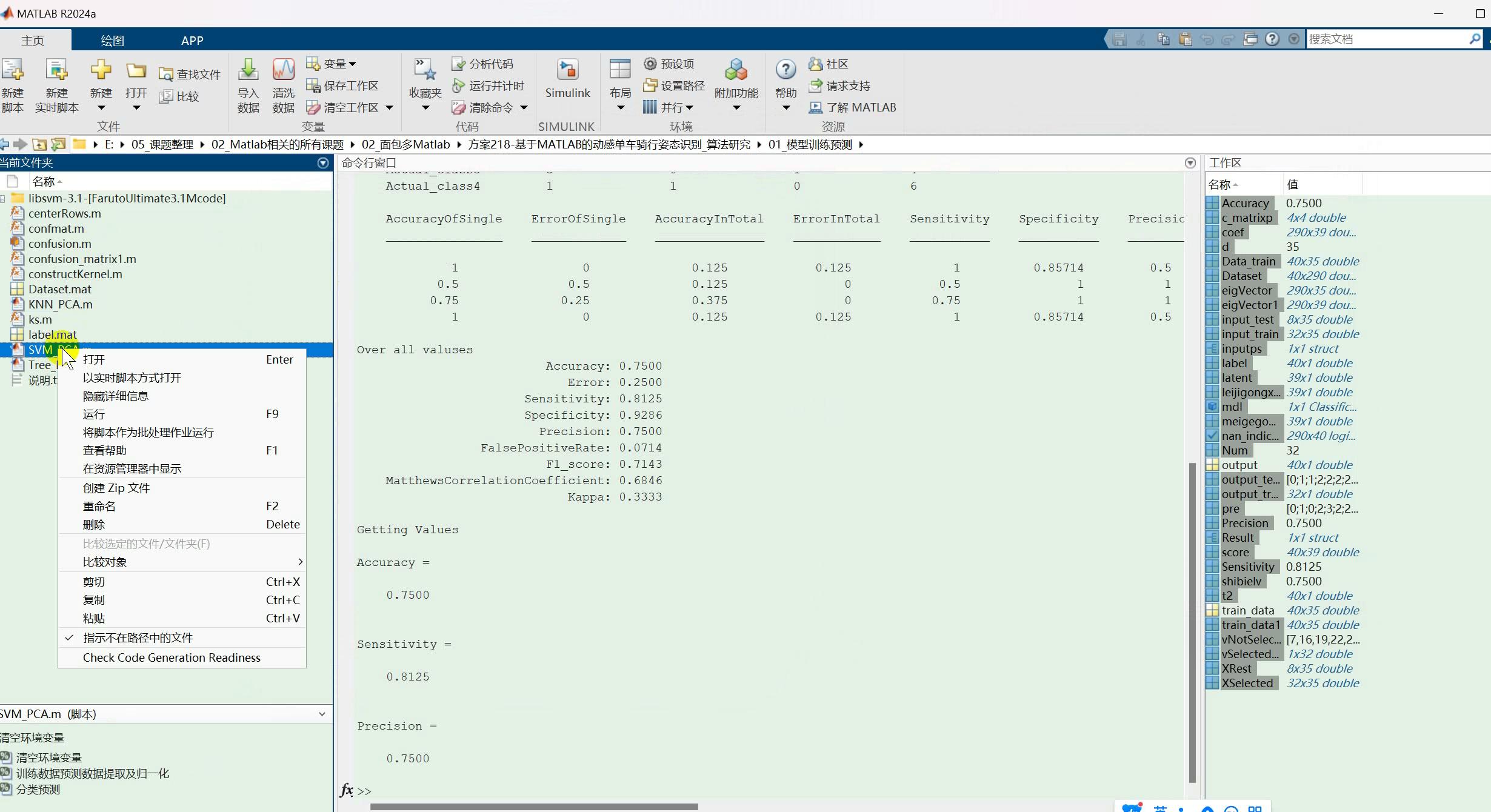
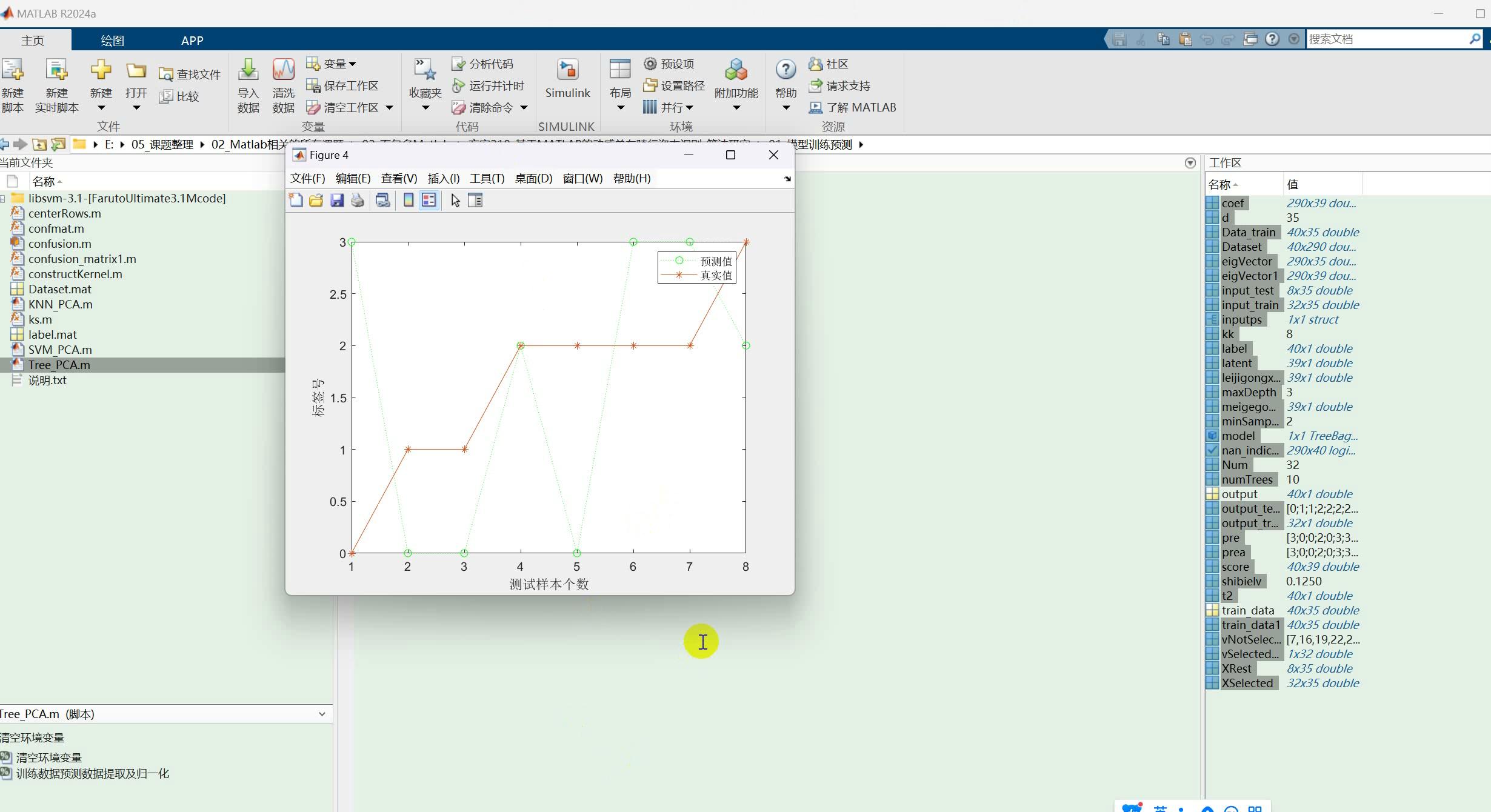
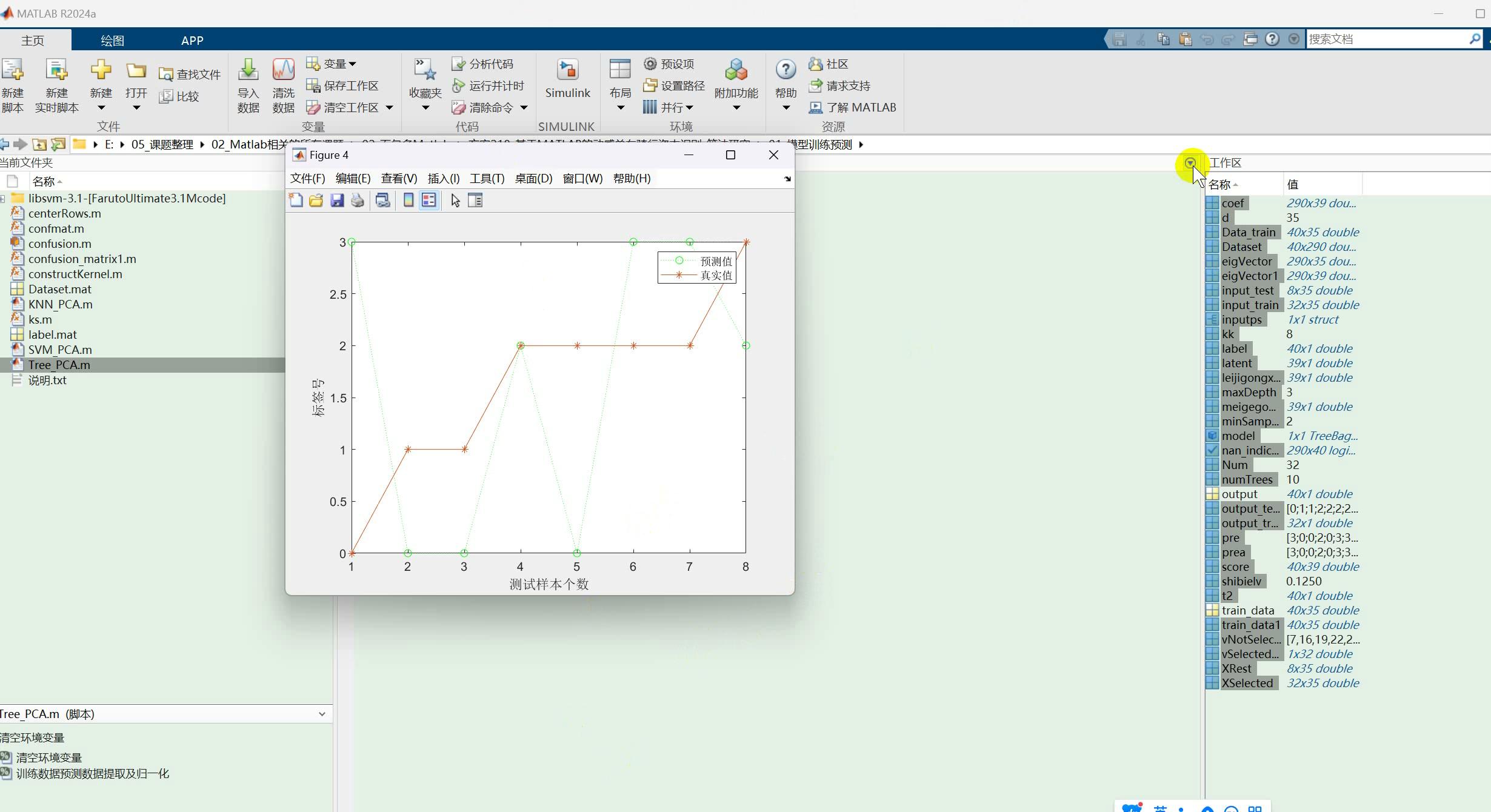
- 算法:UKF姿态估计、阈值检测、机器学习分类。
🚴 项目概述
本研究针对动感单车骑行过程中的姿态变化,提出一种基于MATLAB的实时姿态识别方法。通过在膝关节和脚背安装惯性传感器,获取姿态角度与加速度数据,利用无迹卡尔曼滤波 (UKF) 进行姿态解算,并通过特征提取与阈值比较实现姿态识别。