科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本是2018b,高版本直接跑,低版本可以联系我降版本!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
(复现)基于模型预测控制与人工势场融合MPAPF的海上水面船舶MASS自主避碰运动规划(静态障碍物、动态目标船、符合国际海上避碰规则)
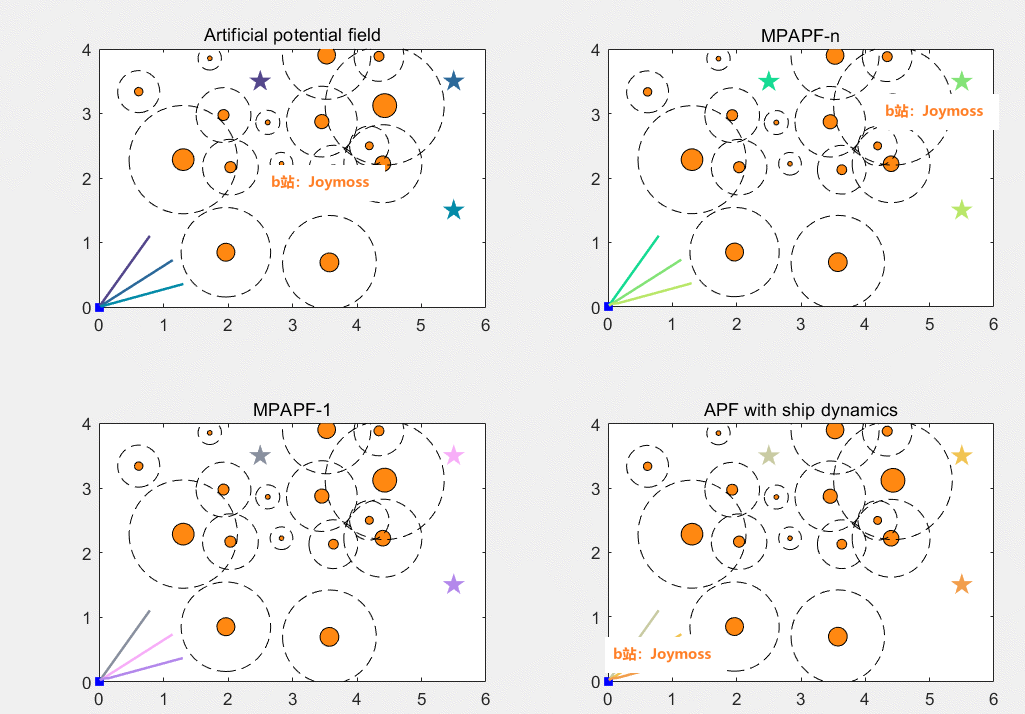
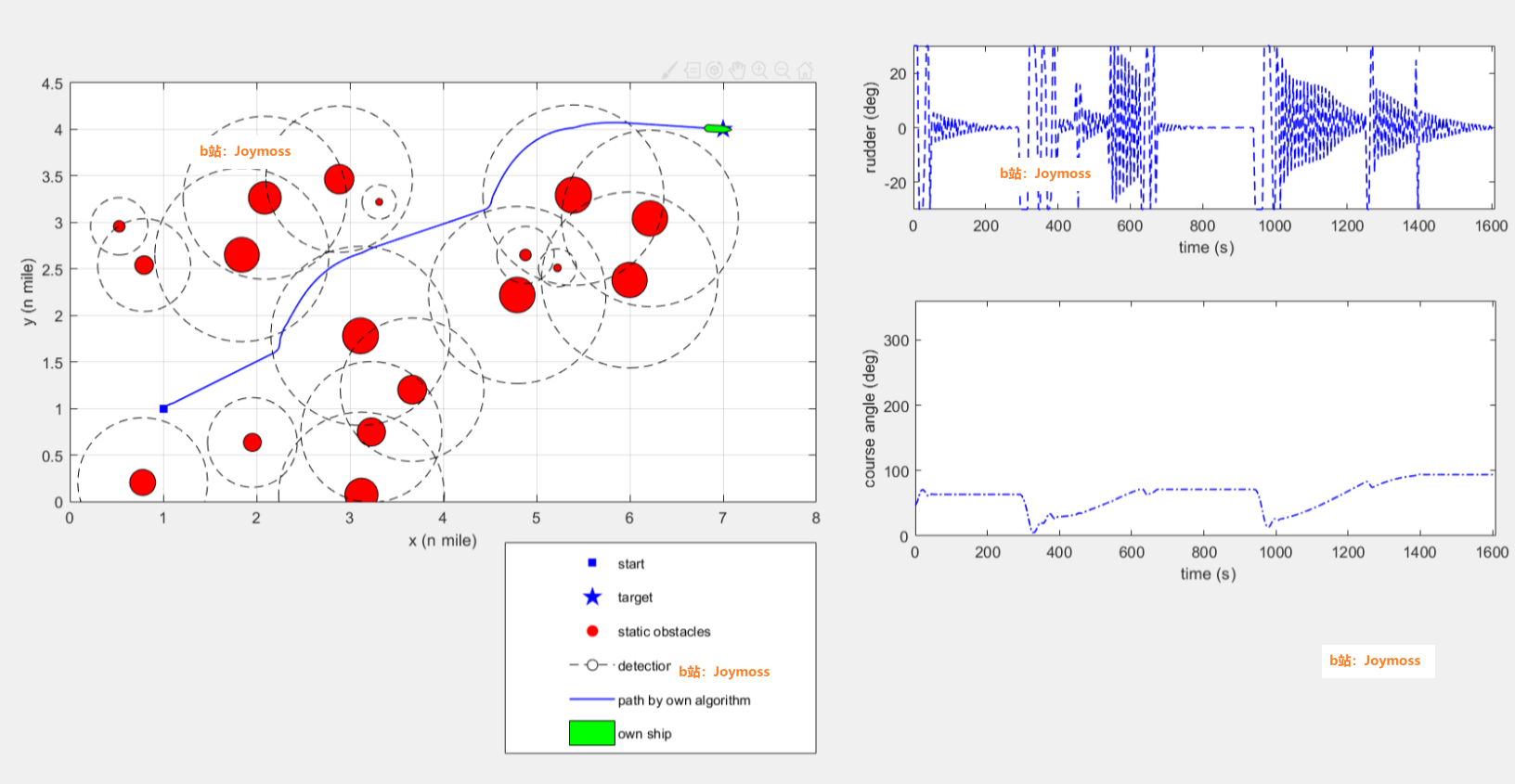
1.内容概述:海上自主水面船舶(MASS)自主导航的核心挑战——复杂动态环境下的运动规划与避碰。提出了一种创新的模型预测人工势场(MPAPF)方法,旨在解决传统规划算法在实时性、规则符合性及船舶运动可行性方面的不足。该方法的核心在于深度融合了模型预测控制的前瞻优化能力与人工势场的直观反应机制。具体而言,研究首先设计了一种符合《国际海上避碰规则》(COLREGs)的新型非对称船舶领域模型,并为其构建了闭合区间势场函数,以严格界定其他船舶不可进入的安全区域。在规划过程中,采用野本模型描述船舶运动学特性,确保生成的路径切实可被船舶跟踪执行。MPAPF 的创新之处在于,它将船舶运动规划这一复杂问题,转化为一个带有多重约束(包括操纵性、COLREGs规则、航道限制等)的非线性滚动优化问题。通过在每个决策时刻预测未来数步的势场变化,算法能够提前规划,有效避免了传统人工势场法常见的“局部最优陷阱”(如陷入死区),并在多船相遇的复杂场景中做出既安全又合规的决策。
2.提出了一种模型预测人工势场(MPAPF)算法,结合了模型预测控制策略与人工势场方法,用于船舶在复杂相遇场景中的运动规划。
3.采用模型预测控制策略,将运动规划问题转化为带有多重约束的非线性优化问题,通过预测未来若干步的势场变化,动态生成最优控制序列。
4.控制对象为海上自主水面船舶(MASS),在包含静态障碍物、动态目标船以及符合国际海上避碰规则(COLREGs)的复杂相遇场景中进行运动规划与碰撞避免。
5.附上参考文献《A novel model predictive artificial potential field based ship motion planning method considering COLREGs for complex encounter scenarios》