付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行无水印)
1.功能介绍
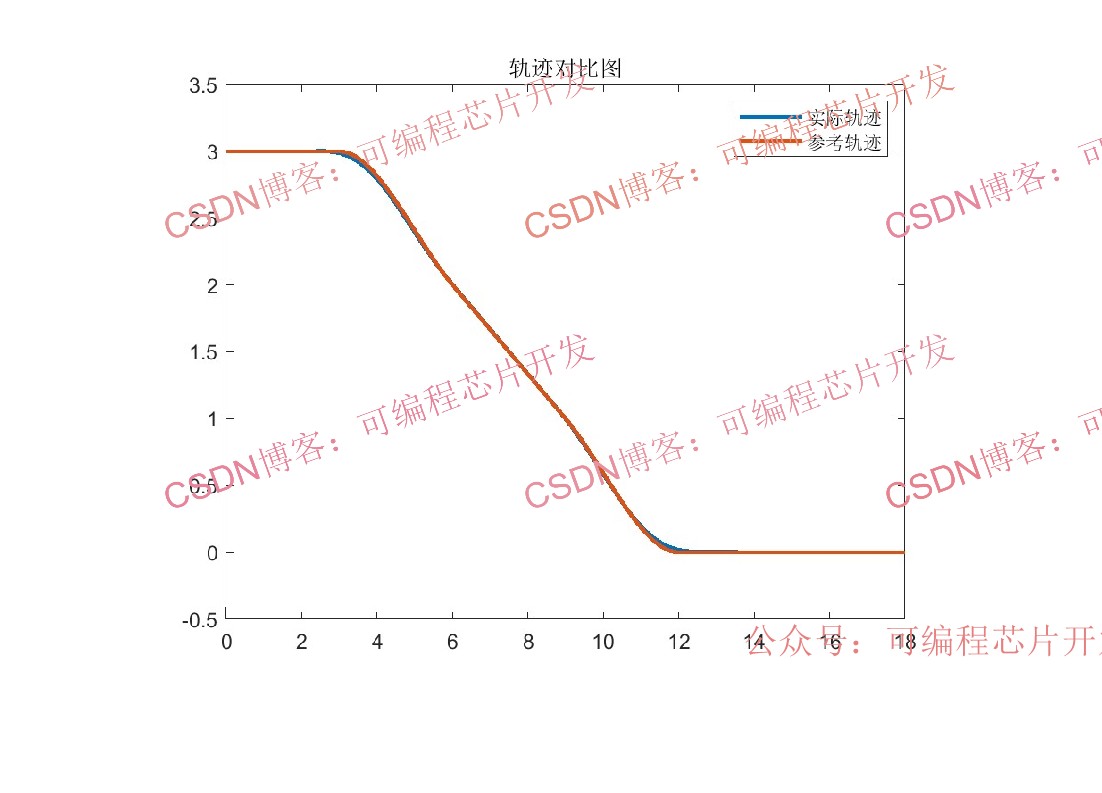
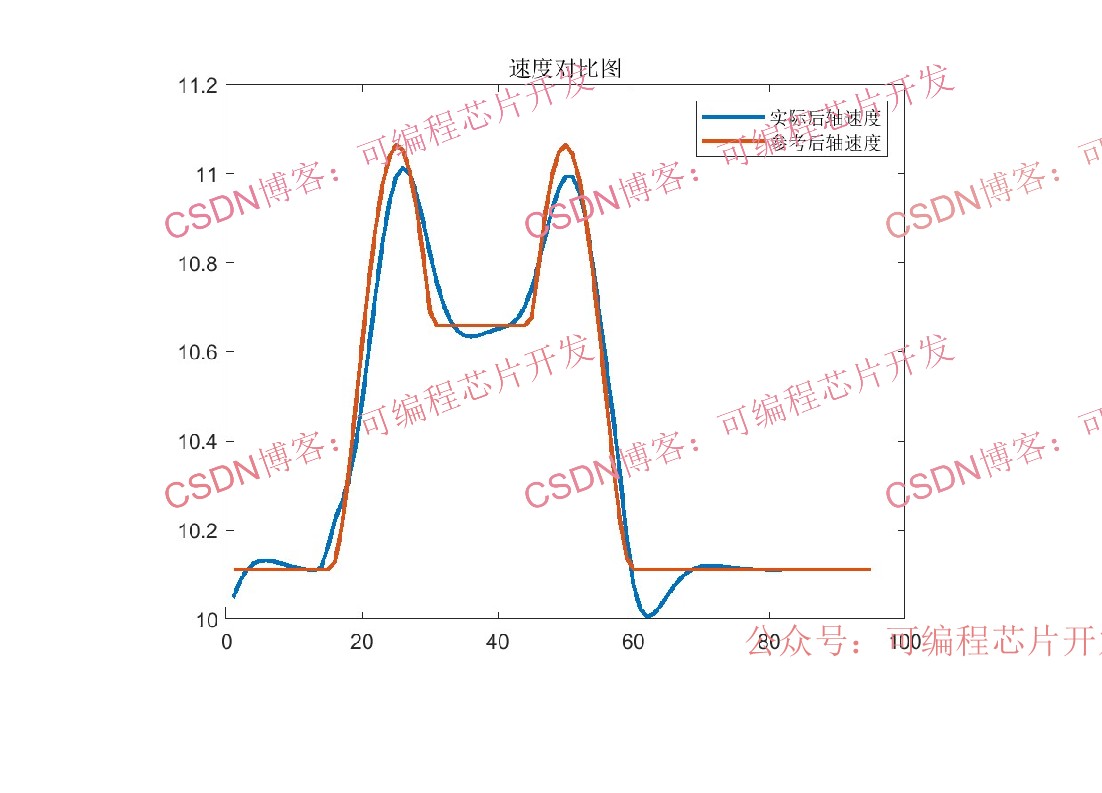
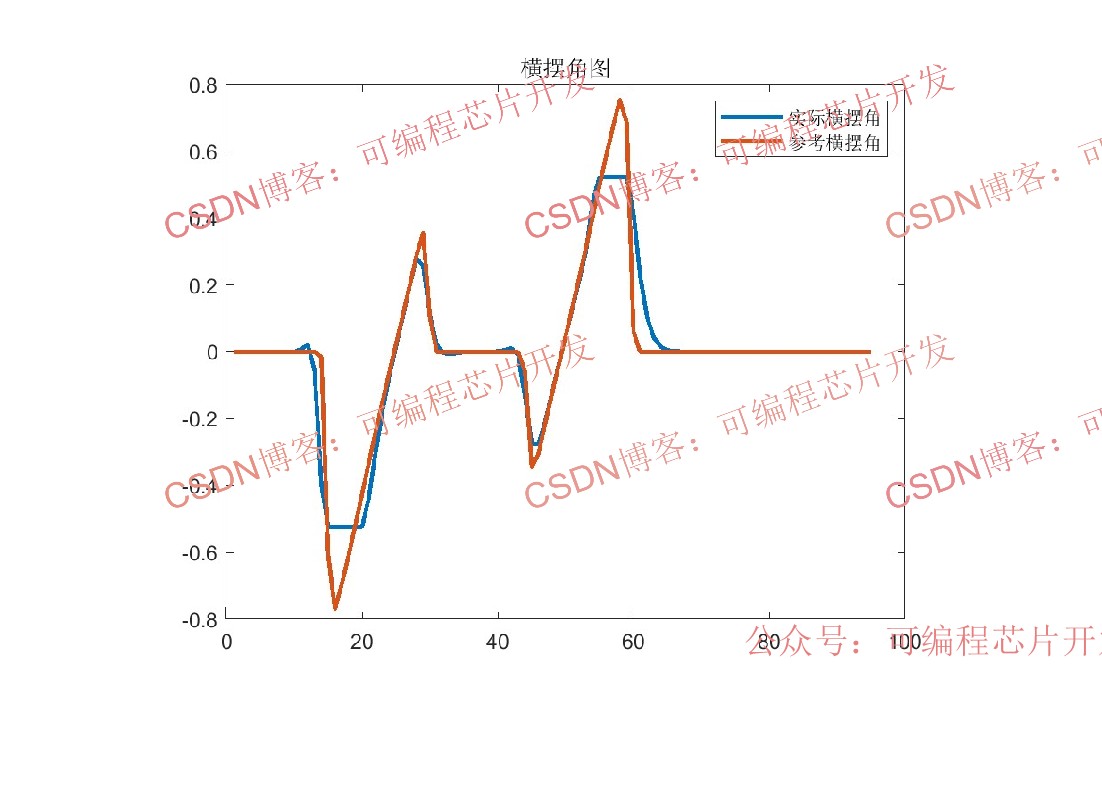
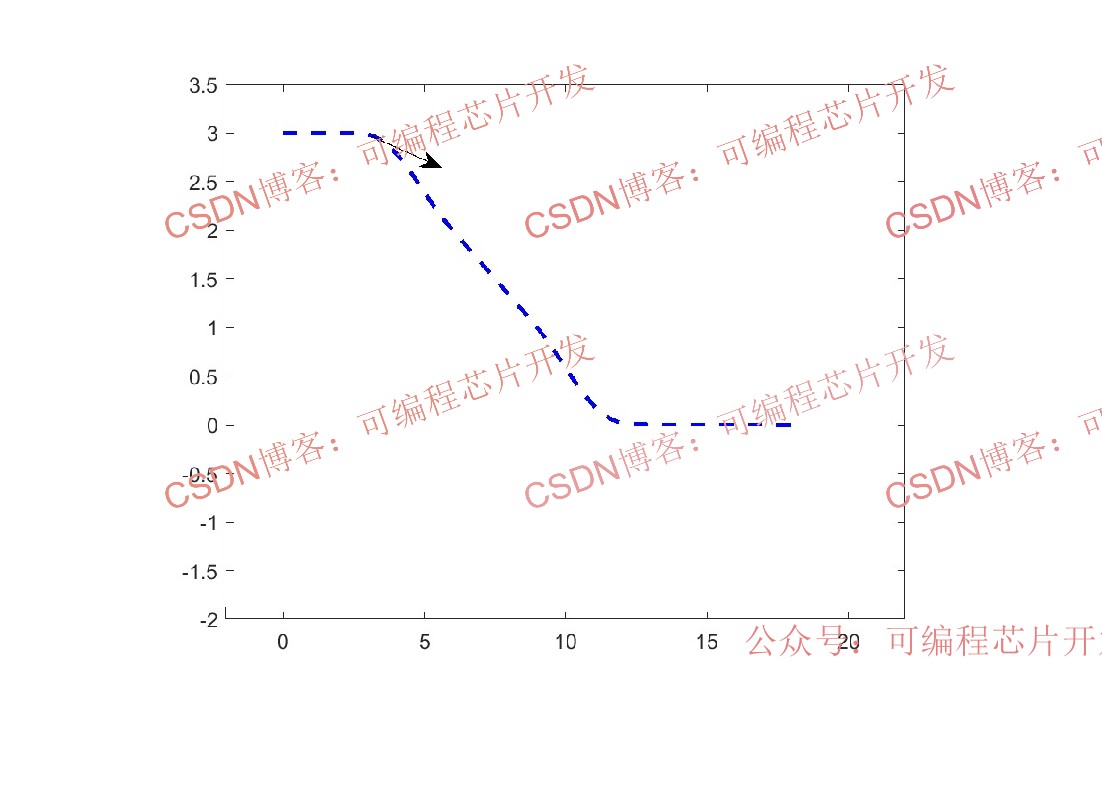
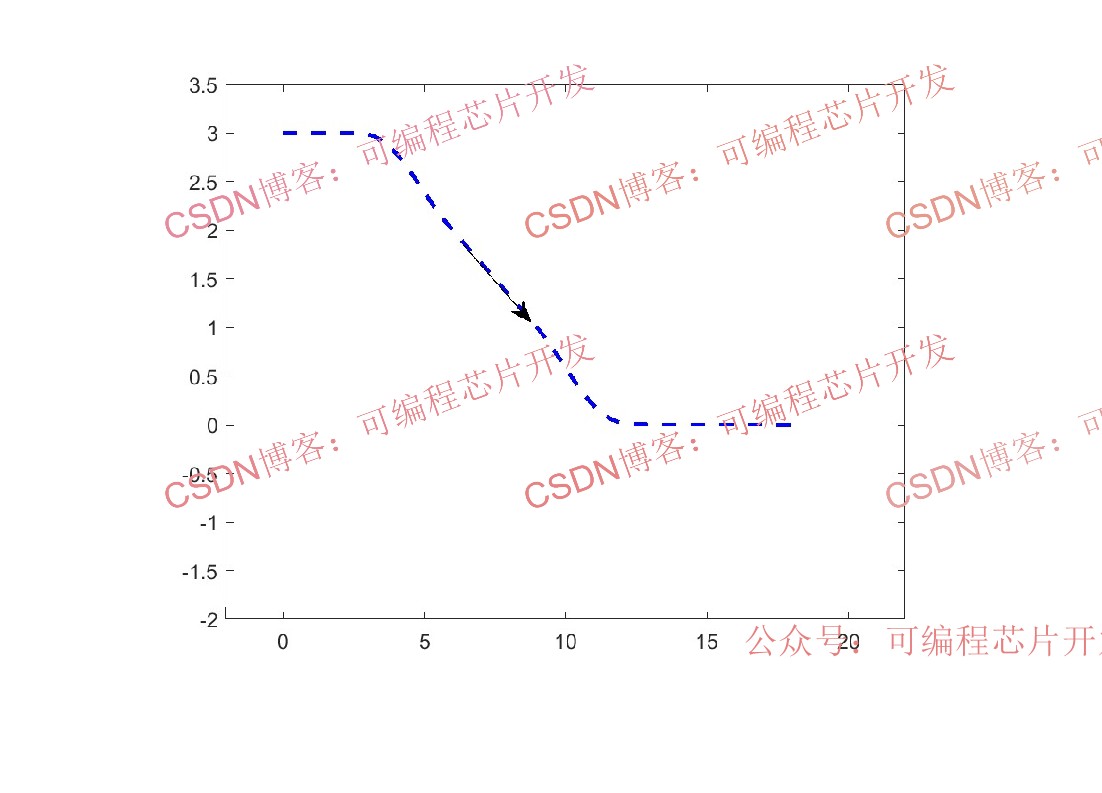
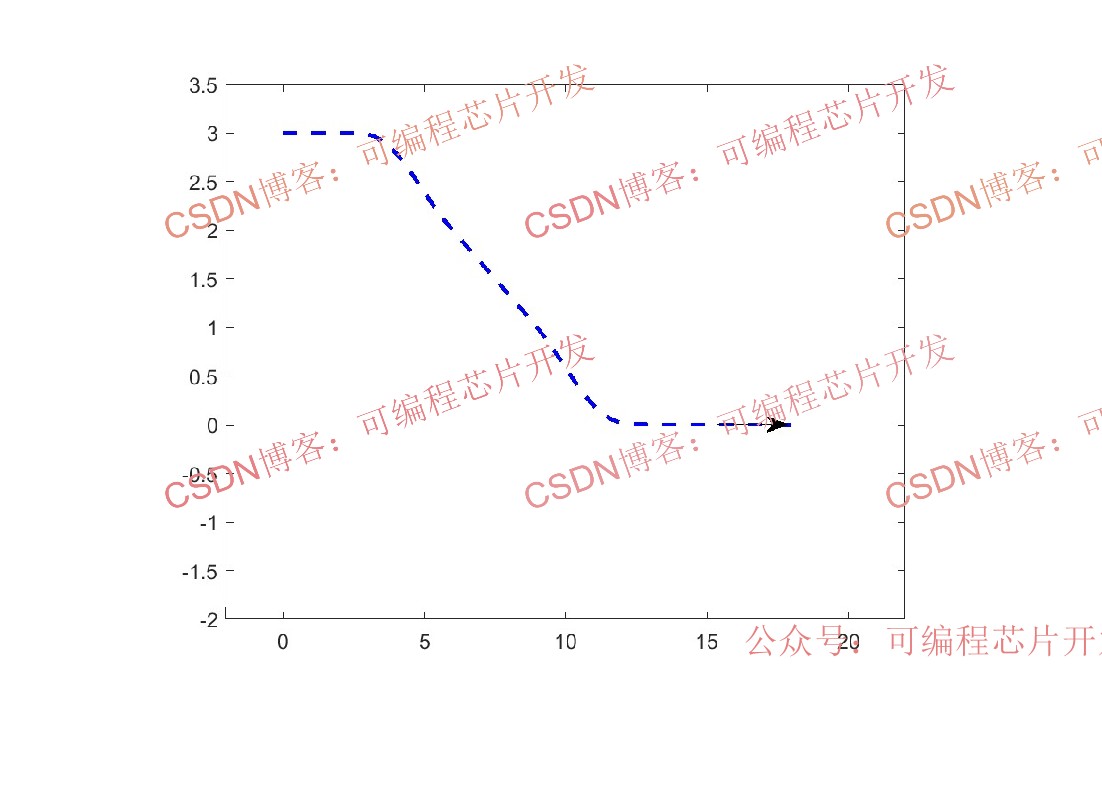
在自动驾驶和高级辅助驾驶系统中,车辆需要根据规划好的参考轨迹进行精确跟踪。由于车辆是强耦合、非线性、带约束的动态系统,传统的PID控制难以同时满足跟踪精度、稳定性和安全性要求。模型预测控制(MPC)凭借其能处理多变量、约束、滚动时域优化的特点,成为车辆轨迹跟踪的主流方法。
2.使用版本
matlab2022b
3.本作品包含内容
项目工程源文件/完整程序,中文注释,程序操作方法视频,参考文献,说明
4.仿真测试效果截图