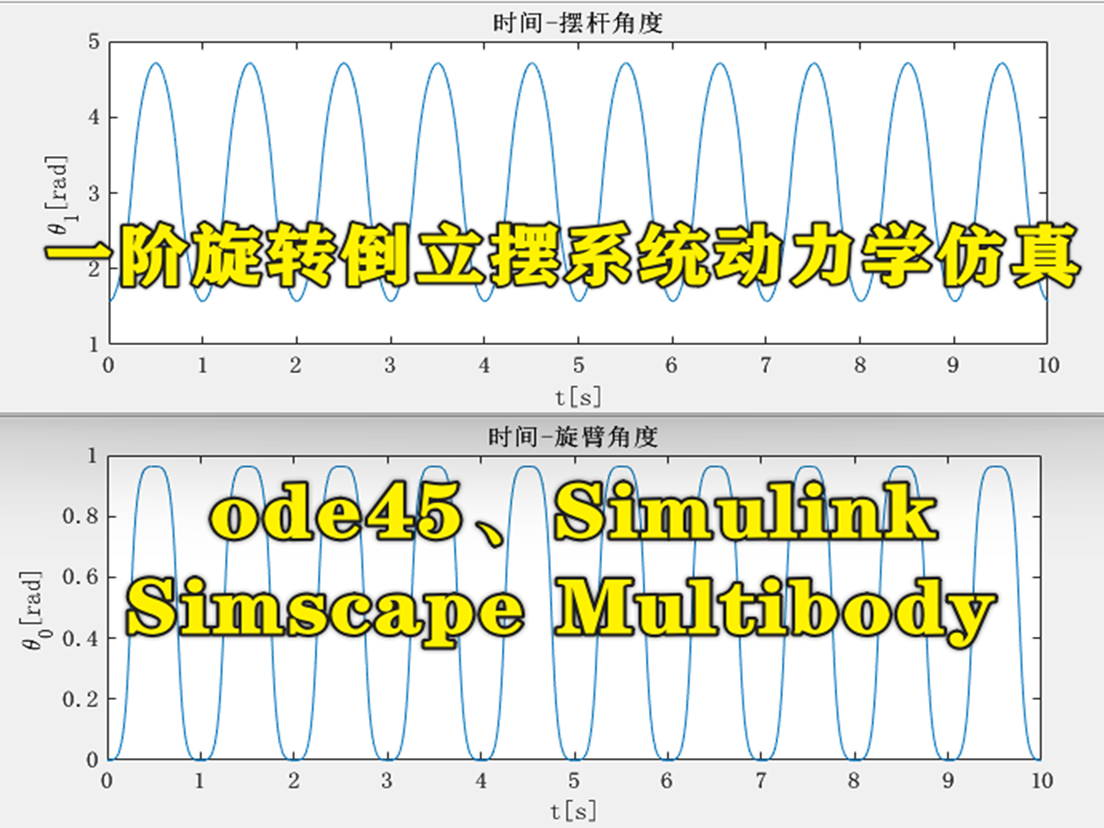
基于Matlab的一阶旋转倒立摆系统动力学仿真,通过三种方法:ode45、Simulink 及 Simscape Multibody分析了倒立摆的摆杆和旋臂随时间变化曲线,可定义总臂长、支点到摆锤质心的距离、质量等相关参数。程序已调通,可直接运行。
基于Matlab的一阶旋转倒立摆系统动力学仿真,通过三种方法:ode45、Simulink 及 Simscape Multibody分析了倒立摆的摆杆和旋臂随时间变化曲线,可定义总臂长、支点到摆锤质心的距离、质量等相关参数。程序已调通,可直接运行。