科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
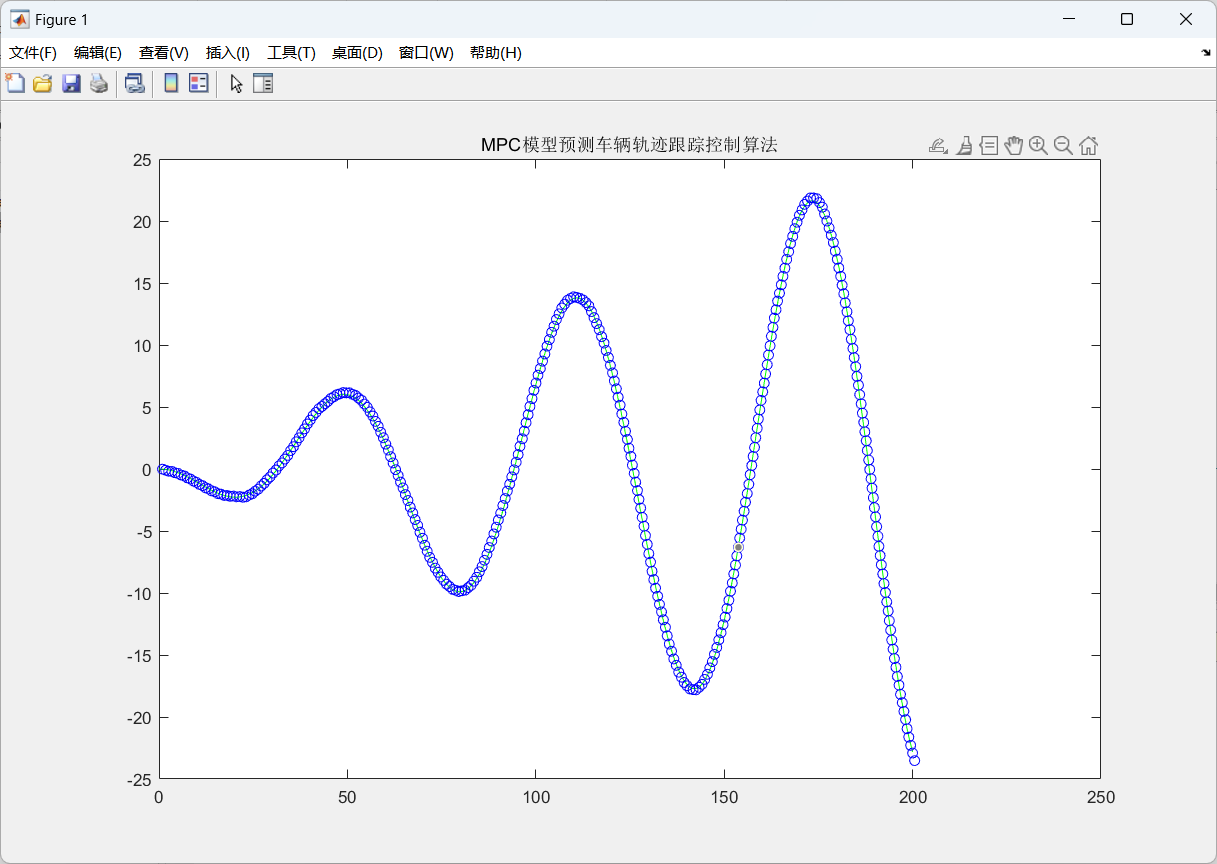
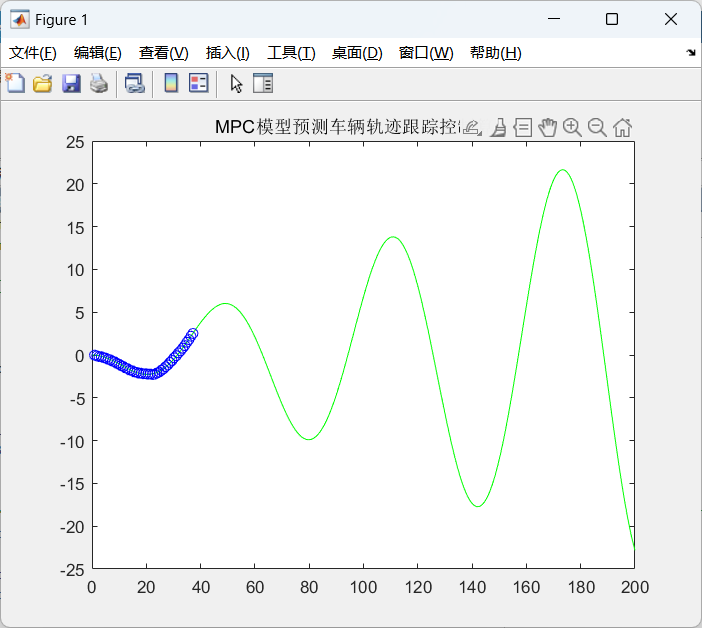
基于Matlab的MPC模型预测控制算法的车辆轨迹跟踪控制算法程序
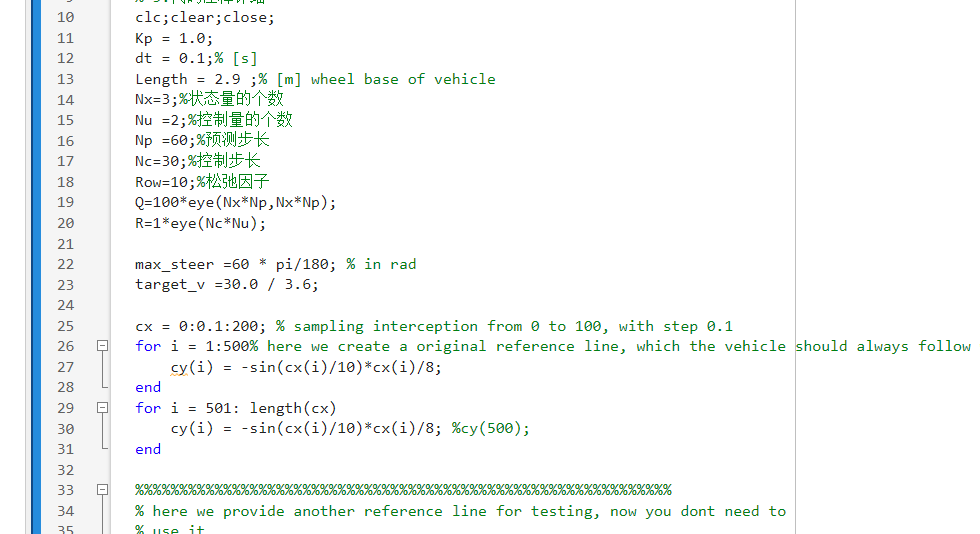
1.主要采用模型预测控制算法实现车辆的轨迹跟踪控制。该算法通过构建包含车辆状态与控制的增广系统模型,利用线性化方法处理非线性车辆动力学,并在每个控制周期内求解带约束的二次规划问题,从而获得最优的前轮转角和速度控制量。
2.算法中包含了预测时域与控制时域的参数设定,并引入松弛变量处理约束冲突。
3.代码里额外提供了PID算法用于速度的单独调节,作为备用策略,修改后可直接使用。
4.控制对象为车辆模型,其状态包括纵向位置、横向位置和航向角。车辆模型考虑轴距参数,通过前轮转角和速度实现对车辆运动轨迹的控制。系统以预设的参考路径为目标,通过实时计算车辆当前位置与参考路径的横向偏差,动态调整控制量,使车辆能够跟踪一条由正弦函数生成的连续曲线路径,并在跟踪过程中满足转向角幅值、控制增量等多类约束。
5.代码注释详细