科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本要求2023b或以上,代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
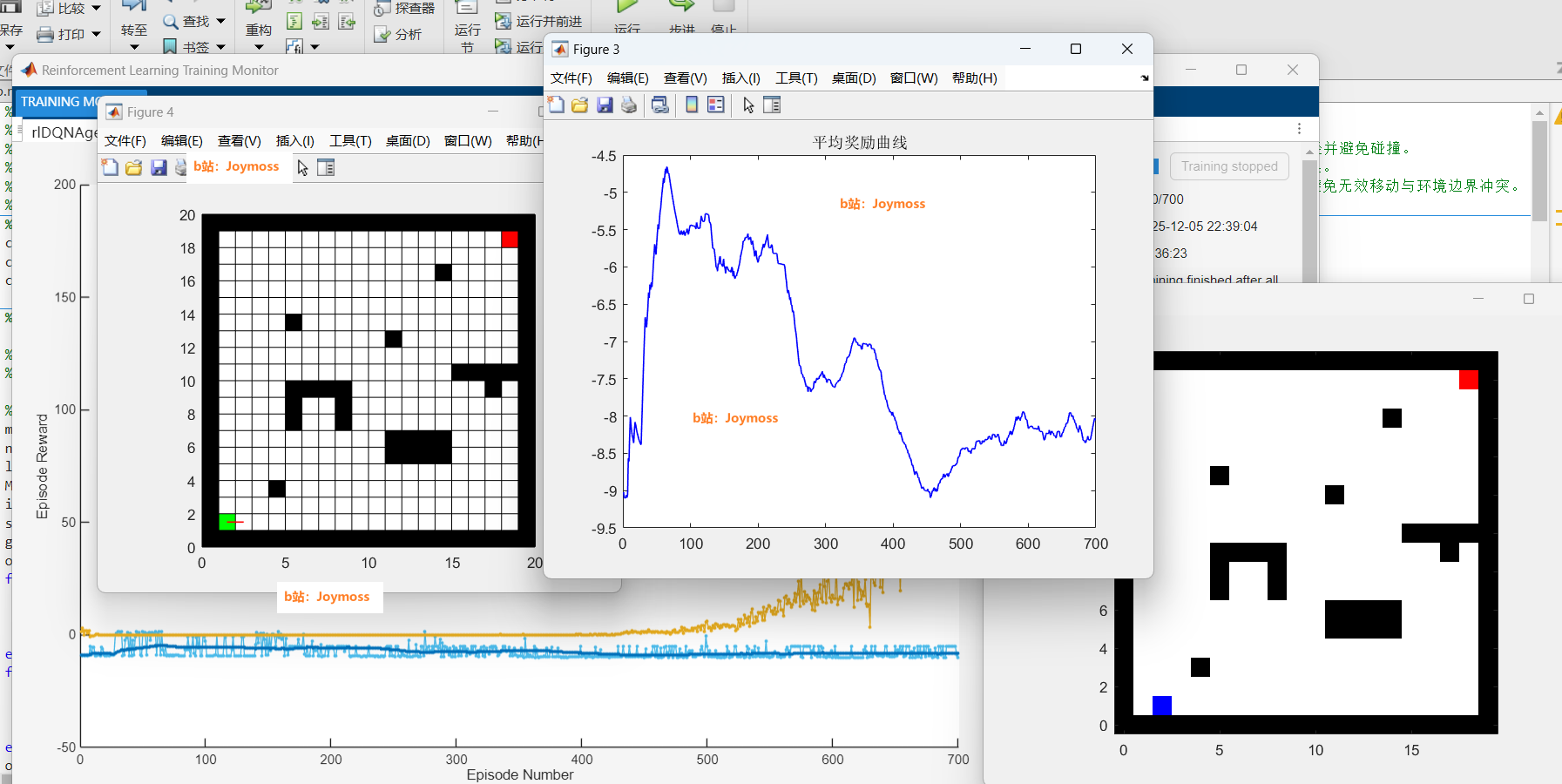
基于深度强化学习(Deep Q-Network,DQN)的移动机器人自主导航与路径规划算法
1.强化学习智能体构建与训练控制:使用深度Q网络(DQN)构建强化学习智能体,在自定义栅格环境中进行训练与决策。训练智能体在包含障碍物的环境中从起点导航到终点,学习最优路径并避免碰撞。
2.环境与可视化控制:实现环境状态的实时可视化,包括机器人位置(蓝色)、目标点(红色)和障碍物(黑色)。提供训练与仿真过程的可视化界面,便于观察智能体行为与路径学习效果。
3.奖励与终止条件控制:定义奖励函数(到达目标给予正奖励,每一步给予小惩罚,撞墙或静止给予额外惩罚)和终止条件(到达目标即结束)。可以引导智能体快速、高效地找到目标,避免无效移动与环境边界冲突。
4.路径规划与决策仿真控制:训练完成后进行路径仿真,绘制智能体从起点到终点的实际运动轨迹。验证训练效果,实现智能体在复杂障碍环境中的路径规划效果。