科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本是2019b,高版本直接跑!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
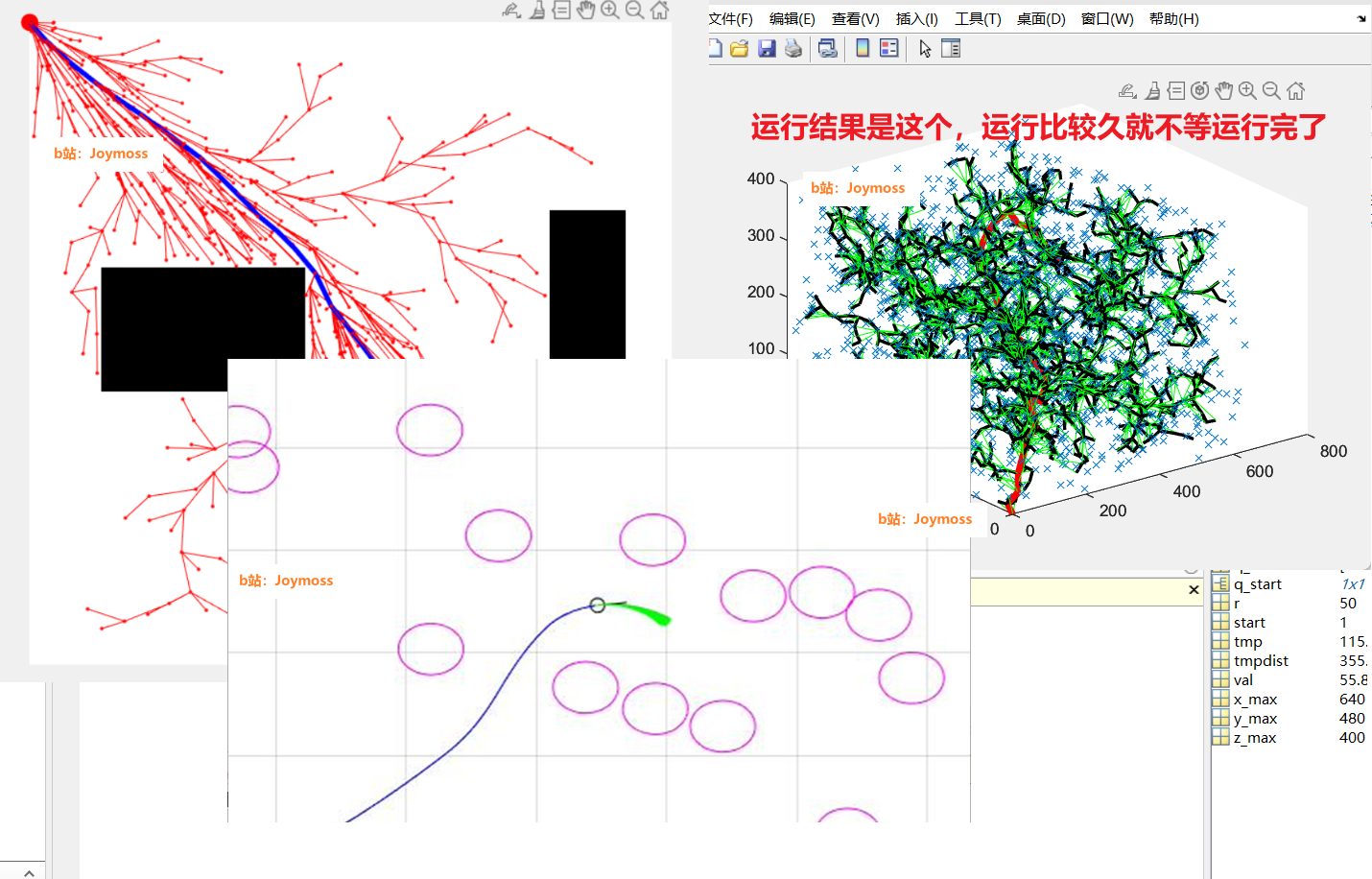
基于静态动态障碍物DWA、DWA+RRT*、改进A*、RRT* 2D和3D的路径规划算法Matlab代码
1.包括以下代码,分别放置在6个文件夹中,仿真分类学习,每个代码文件夹的描述如下:
①RRT和RRT*
包含RRT和RRT*两种路径规划算法对比
②RRT* 2D 3D
包含2D和3D下的RRT*路径规划算法,支持2D和3D空间。2D版本包含了根据障碍物的位置和尺寸进行障碍物躲避。
③改进A*
改进了传统A*。首先,将移动方向从传统的四方向扩展为八方向(包括对角线),显著提升了路径平滑性和最优性;其次,采用混合距离度量策略,使用欧几里得距离计算实际代价,同时采用曼哈顿距离作为启发函数,在保证算法可接纳性的同时优化了路径质量;此外,算法实现了动态路径更新机制,发现更优路径时会实时更新节点代价和完整路径信息;
④DWA+静态障碍物
在静态障碍物环境下,基于当前机器人状态(位置、速度等)和机器人运动模型来计算。窗口内的控制输入(速度和角速度),这些输入可以使得机器人在未来一段时间内避免碰撞并向目标前进。
⑤DWA+动态障碍物
主要改进在于使障碍物动态化,速度和角速度可以变化。
⑥DWA+RRT*
全局寻优与局部动态响应的平衡:RRT*提供渐进最优的全局路径,确保在大范围复杂环境中能找到理论上的最优解;而DWA则专注于局部实时避障,能够根据机器人当前的运动状态和动态障碍物信息进行在线轨迹优化,使系统既具备全局视野又保持局部灵活性。