✨ 快来看~链接里的资料和展示一样滴!✨ 先查看资料细节,再决定要不要购买哦~ 😊 受限于面包多文件大小,购买后将通过以下方式获取资料:付款后,在商品界面解锁一个文档,文档内含百度网盘下载链接~ 自行下载网盘里的资料哈💻版本问题可以私信我哦~ 模型为Matlab2018b,Carsim 2019
基于考虑神经滞后、动作滞后和最优侧向加速度的横向单点预瞄驾驶员模型
软件平台Carsim2019+Matlab2018b
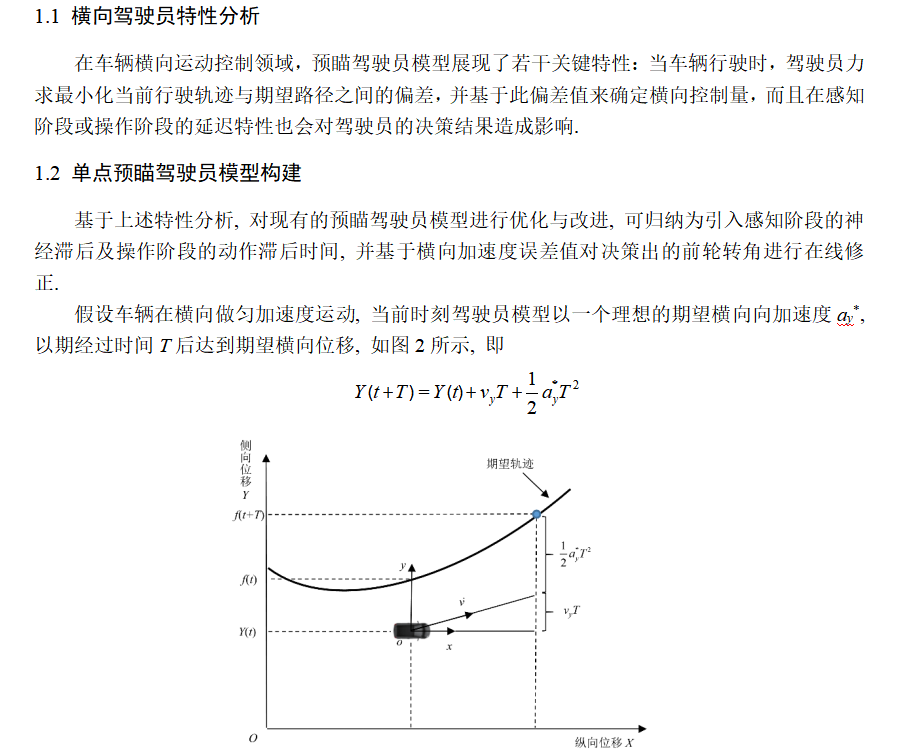
(1)单点预瞄驾驶员模型构建:当车辆行驶时,驾驶员力求最小化当前行驶轨迹与期望路径之间的偏差,并基于此偏差值来确定横向控制量,而且在感知阶段或操作阶段的延迟特性也会对驾驶员的决策结果造成影响。基于上述特性分析, 对现有的预瞄驾驶员模型进行优化与改进, 可归纳为引入感知阶段的神经滞后及操作阶段的动作滞后时间, 并基于横向加速度误差值对决策出的前轮转角进行在线修正。
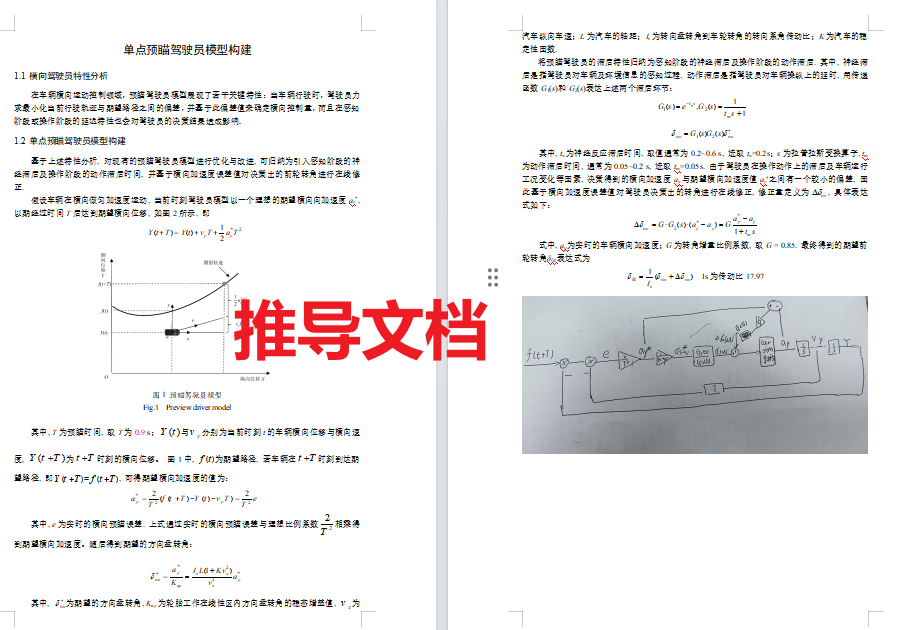
(2)将预瞄驾驶员的滞后特性归纳为感知阶段的神经滞后及操作阶段的动作滞后. 其中, 神经滞后是指驾驶员对车辆及环境信息的感知过程, 动作滞后是指驾驶员对车辆操纵上的延时
(3)神经反应时间和动作反应时间都用传递函数的形式表示, 最终的前轮转角包含两部分,一部分是基于最优侧向加速度求出来的,一部分是基于最优侧向加速度和实际加速度的误差得到的部分,最终两个部分相加输入到车辆中
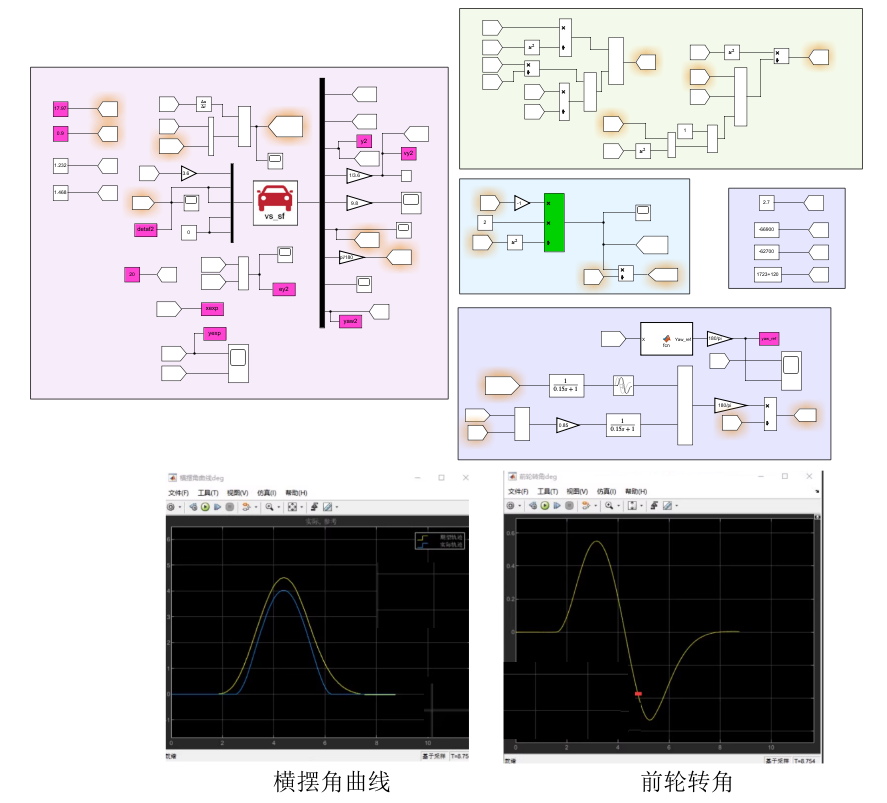
(4)仿真可以模拟驾驶员的换道行为,主要是参考基于最优侧向加速度的横向单点预瞄驾驶员模型。
(5)对比展示输出的侧向位置,横摆角与真实值之间的差异
(6)附赠理论推导说明文档+参考文献