付费后在电脑上使用网页浏览器,登入后自动弹出下载界面(完整程序运行后无水印)
1.作品简介
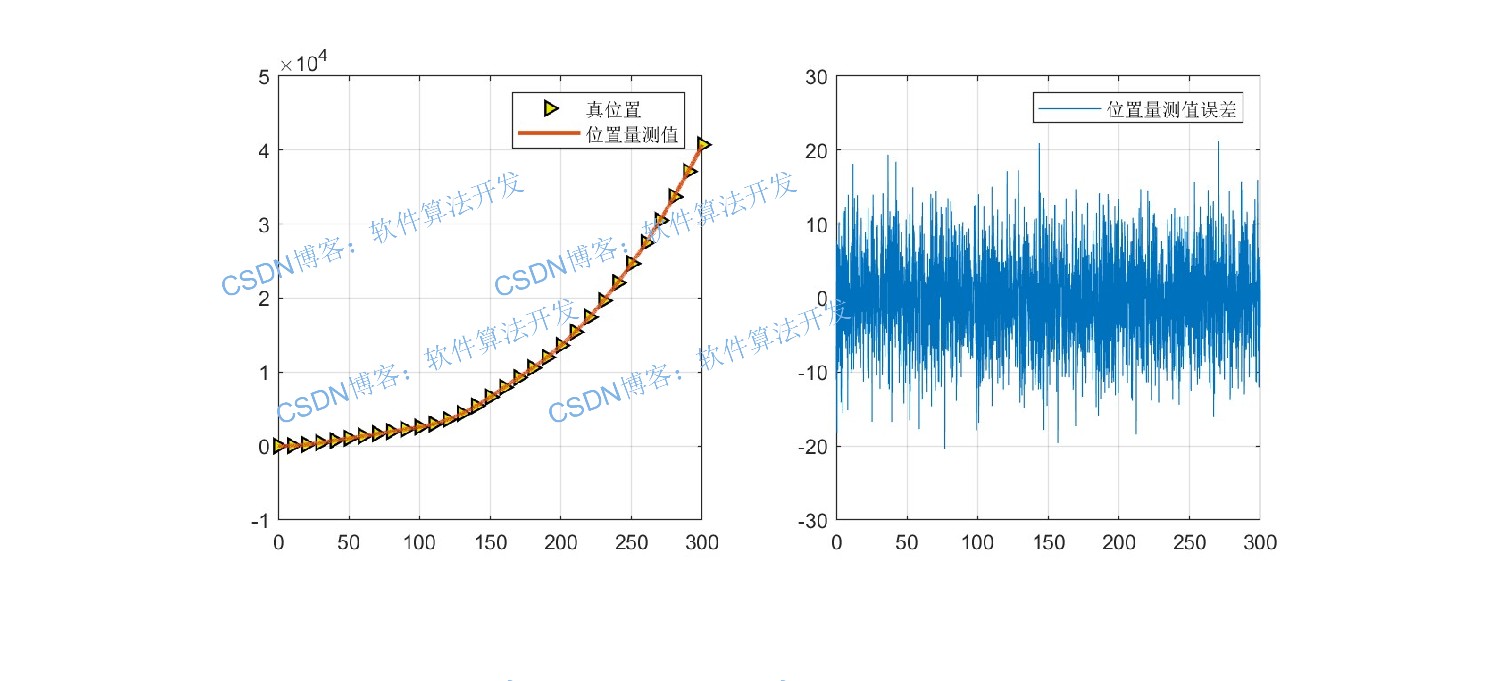
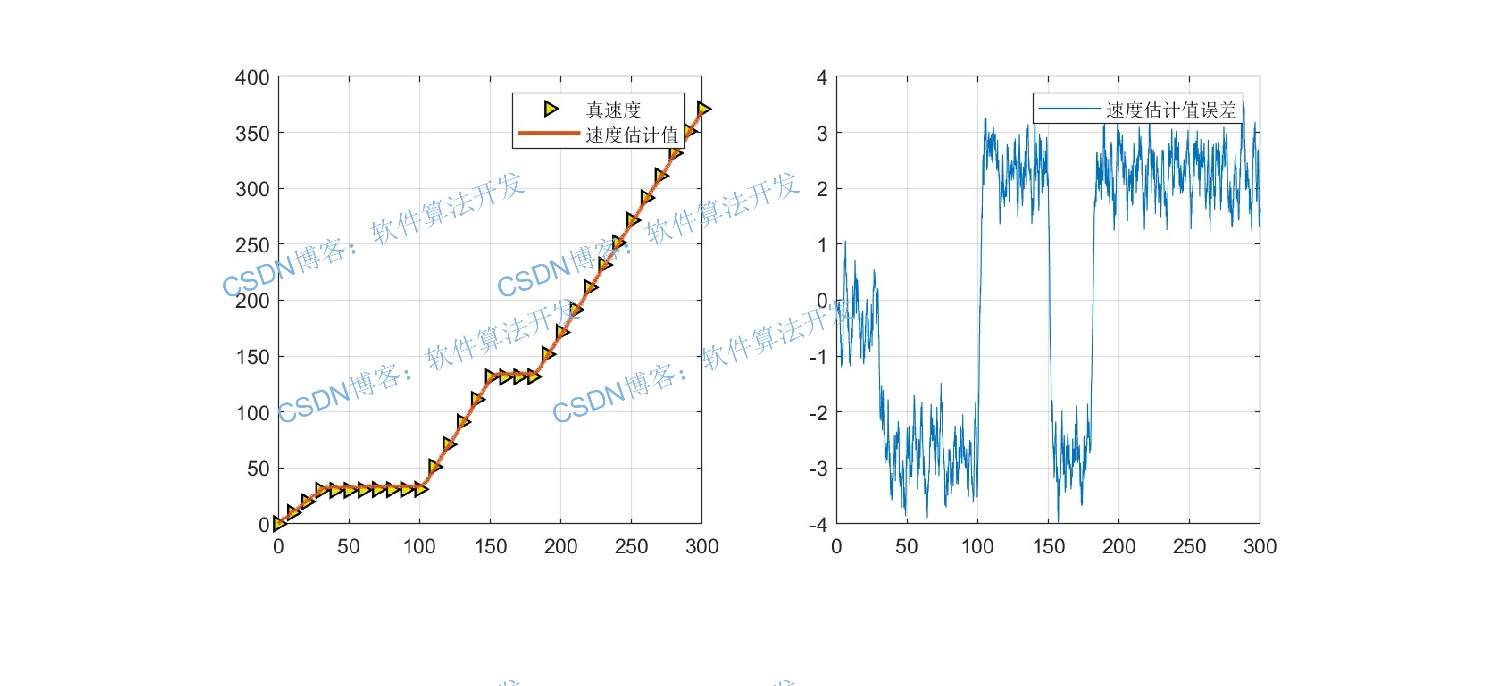
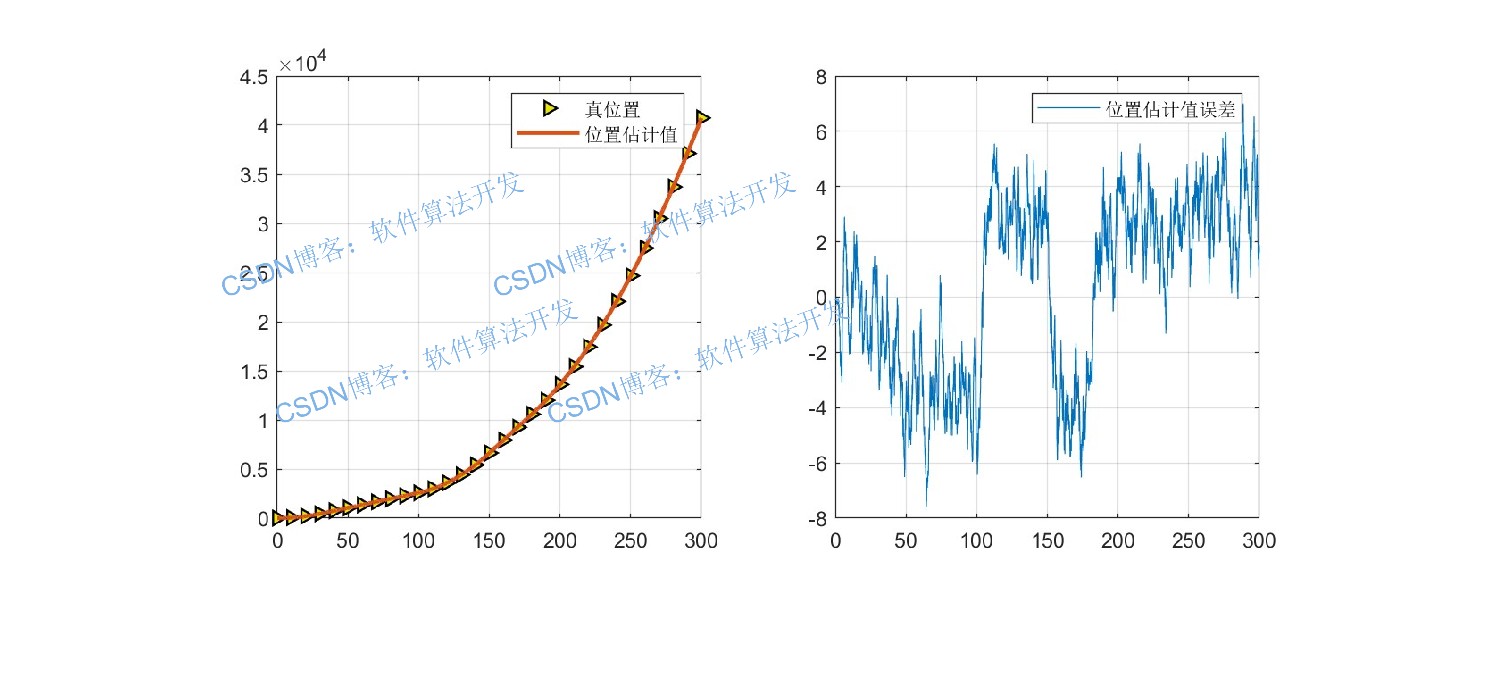
交互式多模型IMM算法是一种用于处理机动目标跟踪的自适应滤波方法,其核心思想是通过多个并行运行的卡尔曼滤波器(对应不同运动模型)对目标状态进行估计,再根据模型概率加权融合得到最终结果。该算法特别适用于目标运动模式存在突变的场景,通过模型间的动态切换机制提高跟踪鲁棒性。
2.软件版本
matlab2022a/matlab2024b
3.作品包含内容
项目工程源文件/完整程序,中文注释,程序操作方法讲解视频
4.仿真效果