科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本是2018b,高版本直接跑,低版本可以联系我降版本!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
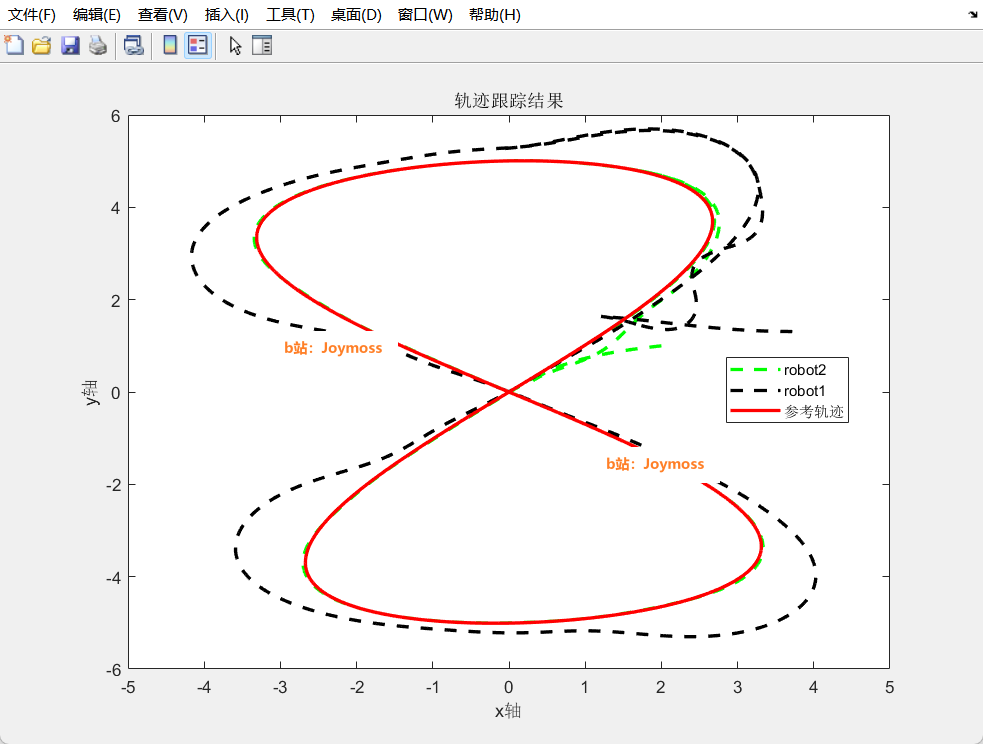
(复现)基于自适应执行器故障补偿控制的两个连杆两轮2WD移动机器人鲁棒轨迹跟踪与容错研究
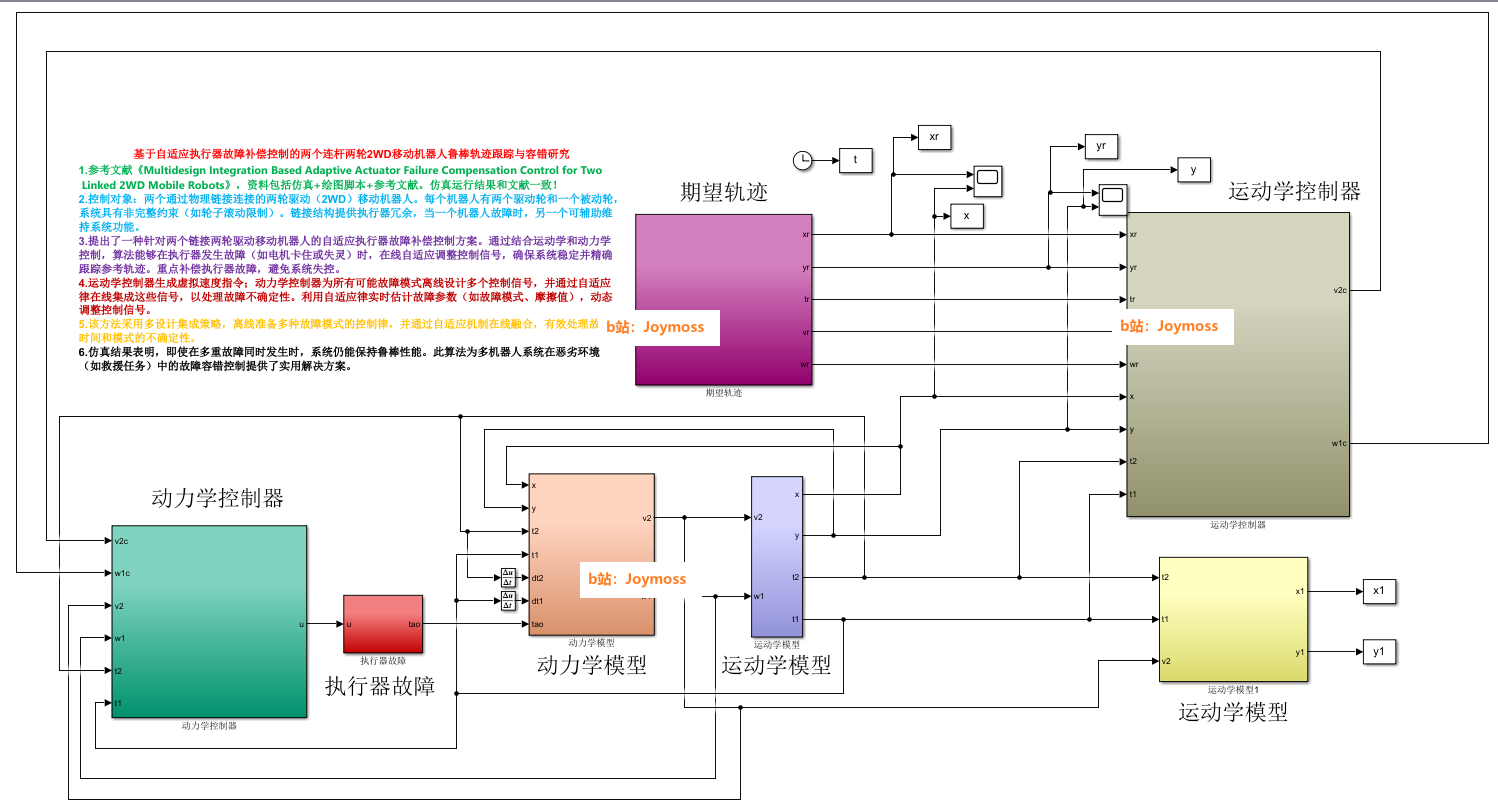
1.参考文献《Multidesign Integration Based Adaptive Actuator Failure Compensation Control for Two Linked 2WD Mobile Robots》,资料包括Simulink仿真(MATLAB Function实现)+绘图脚本+参考文献。仿真运行结果和文献一致!
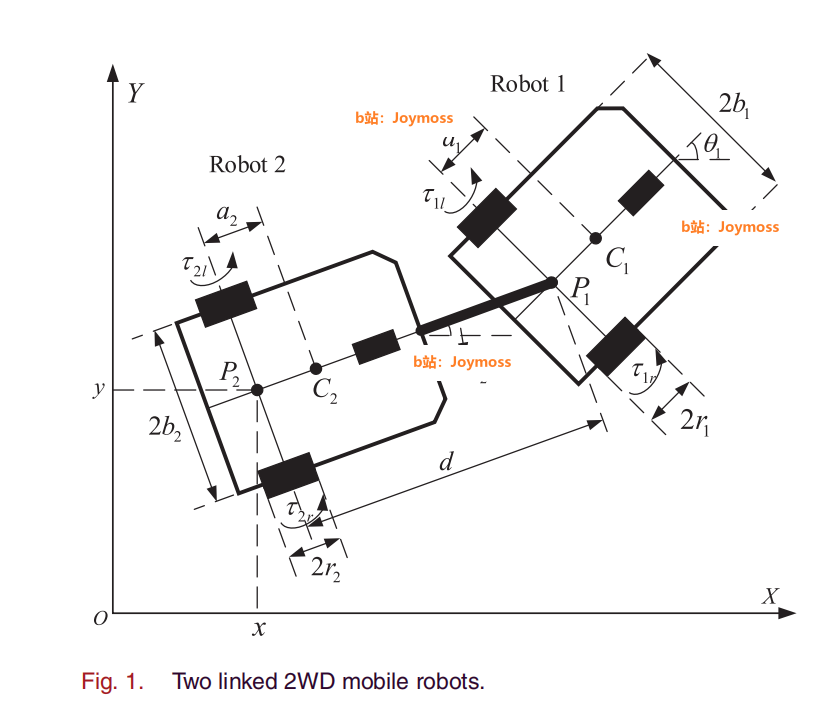
3.控制对象:两个通过物理链接连接的两轮驱动(2WD)移动机器人。每个机器人有两个驱动轮和一个被动轮,系统具有非完整约束(如轮子滚动限制)。链接结构提供执行器冗余,当一个机器人故障时,另一个可辅助维持系统功能。
2.提出了一种针对两个链接两轮驱动移动机器人的自适应执行器故障补偿控制方案。通过结合运动学和动力学控制,算法能够在执行器发生故障(如电机卡住或失灵)时,在线自适应调整控制信号,确保系统稳定并精确跟踪参考轨迹。重点补偿执行器故障,避免系统失控。
3.运动学控制器生成虚拟速度指令;动力学控制器为所有可能故障模式离线设计多个控制信号,并通过自适应律在线集成这些信号,以处理故障不确定性。利用自适应律实时估计故障参数(如故障模式、摩擦值),动态调整控制信号。
4.该方法采用多设计集成策略,离线准备多种故障模式的控制律,并通过自适应机制在线融合,有效处理故障时间和模式的不确定性。
5.仿真结果表明,即使在多重故障同时发生时,系统仍能保持鲁棒性能。此算法为多机器人系统在恶劣环境(如救援任务)中的故障容错控制提供了实用解决方案。