科研新品上线啦!付款即可马上解锁下载连接-自动发货!遇到支付问题,请加我V:AAA2025010101,支付问题记得备注“支付”
———————————————————————
注意:Maltab版本是2018b,高版本直接跑,低版本可以联系我降版本!代码不会使用联系up,一定会第一时间回复您,放心!
———————————————————————
发货的内容是和视频所有内容完全一样滴打包发,运行结果和展示一致!
———————————————————————
视频详情链接->在b站up:Joymoss,主页内搜索同标题名称查看~
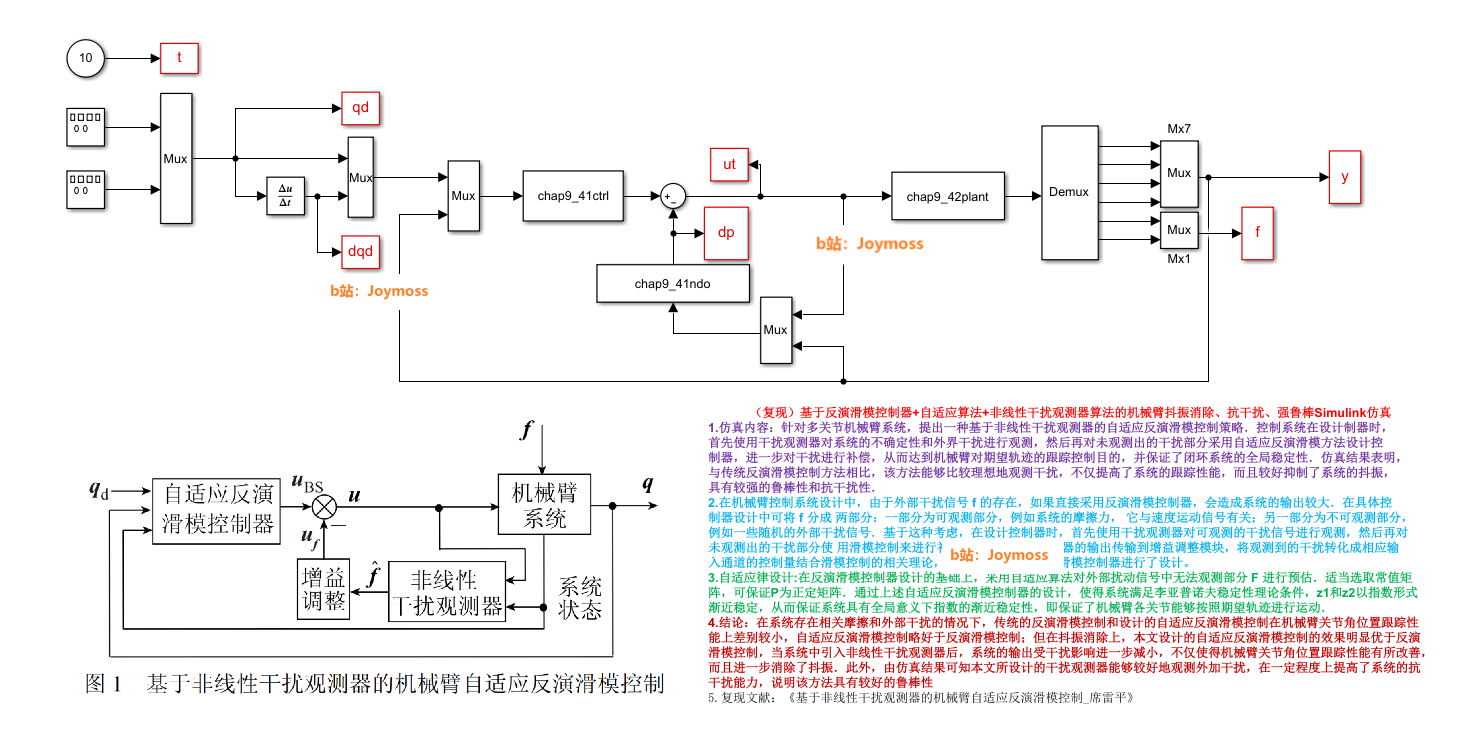
(复现)基于反演滑模控制器+自适应算法+非线性干扰观测器算法的机械臂抖振消除、抗干扰、强鲁棒Simulink仿真
1.仿真内容:针对多关节机械臂系统,提出一种基于非线性干扰观测器的自适应反演滑模控制策略.控制系统在设计制器时,首先使用干扰观测器对系统的不确定性和外界干扰进行观测,然后再对未观测出的干扰部分采用自适应反演滑模方法设计控制器,进一步对干扰进行补偿,从而达到机械臂对期望轨迹的跟踪控制目的,并保证了闭环系统的全局稳定性.仿真结果表明,与传统反演滑模控制方法相比,该方法能够比较理想地观测干扰,不仅提高了系统的跟踪性能,而且较好抑制了系统的抖振,具有较强的鲁棒性和抗干扰性.
2.在机械臂控制系统设计中,由于外部干扰信号 f 的存在,如果直接采用反演滑模控制器,会造成系统的输出较大.在具体控制器设计中可将 f 分成 两部分:一部分为可观测部分,例如系统的摩擦力, 它与速度运动信号有关;另一部分为不可观测部分,例如一些随机的外部干扰信号.基于这种考虑,在设计控制器时,首先使用干扰观测器对可观测的干扰信号进行观测,然后再对未观测出的干扰部分使 用滑模控制来进行补偿,非线性干扰观测器的输出传输到增益调整模块,将观测到的干扰转化成相应输入通道的控制量结合滑模控制的相关理论,对机械臂自适应反演滑模控制器进行了设计。
3.自适应律设计:在反演滑模控制器设计的基础上,采用自适应算法对外部扰动信号中无法观测部分 F 进行预估.适当选取常值矩阵,可保证P为正定矩阵.通过上述自适应反演滑模控制器的设计,使得系统满足李亚普诺夫稳定性理论条件,z1和z2以指数形式渐近稳定,从而保证系统具有全局意义下指数的渐近稳定性,即保证了机械臂各关节能够按照期望轨迹进行运动.
4.结论:在系统存在相关摩擦和外部干扰的情况下,传统的反演滑模控制和设计的自适应反演滑模控制在机械臂关节角位置跟踪性能上差别较小,自适应反演滑模控制略好于反演滑模控制;但在抖振消除上,本文设计的自适应反演滑模控制的效果明显优于反演滑模控制,当系统中引入非线性干扰观测器后,系统的输出受干扰影响进一步减小,不仅使得机械臂关节角位置跟踪性能有所改善,而且进一步消除了抖振.此外,由仿真结果可知本文所设计的干扰观测器能够较好地观测外加干扰,在一定程度上提高了系统的抗干扰能力,说明该方法具有较好的鲁棒性.
5.复现文献:《基于非线性干扰观测器的机械臂自适应反演滑模控制_席雷平》