多智能体、强化学习DQN、路径规划+强化机器人Python学习深度(带Py源码+参考文献)
资料内容目录Python源码:
1.IEEE MRS基于动态任务分配的多机器人自适应规划
2. IEEE TRANS多智能体系统的奖励强化生成对抗网络
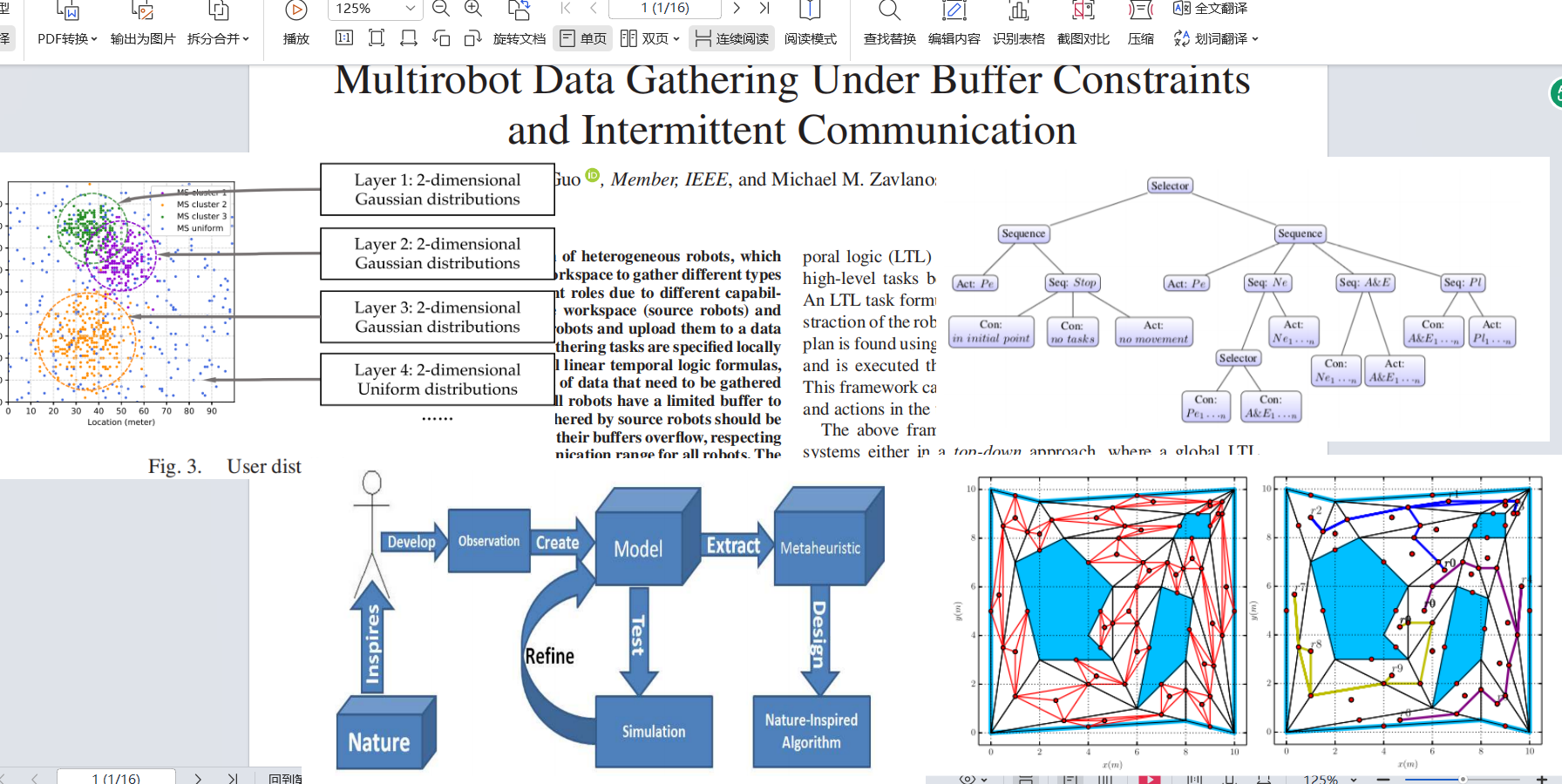
3.IEEE_trans基于约束和间歇通信下的多智能体数据采集
4.多智能体动态系统的集群:算法和理论”的 Python 实现
5.基于ROS的多智能体队形变换控制
6.基于多智能体系统Q学习的路径规划方法
7.基于强化学习和多智能体系统进行图像分类
8.基于网络化多智能体强化学习
9.基于一致性的多UAV智能体集群导航避障方法
10.基于强化学习DQN的UAV3D路径规划

💰直接付款,即可下载完整资料!🔍资料内含文案描述的所有内容,就是这么全面!🔐请你看资料是否符合自己,确认再下单,因为资料是虚拟产品哦!🙋♀如果你遇到了任何下单或者运行报错问题,请随时联系我哦!联系方式V+:kyxlz589🙋♀🙋♀
作者:科研助手小栗子