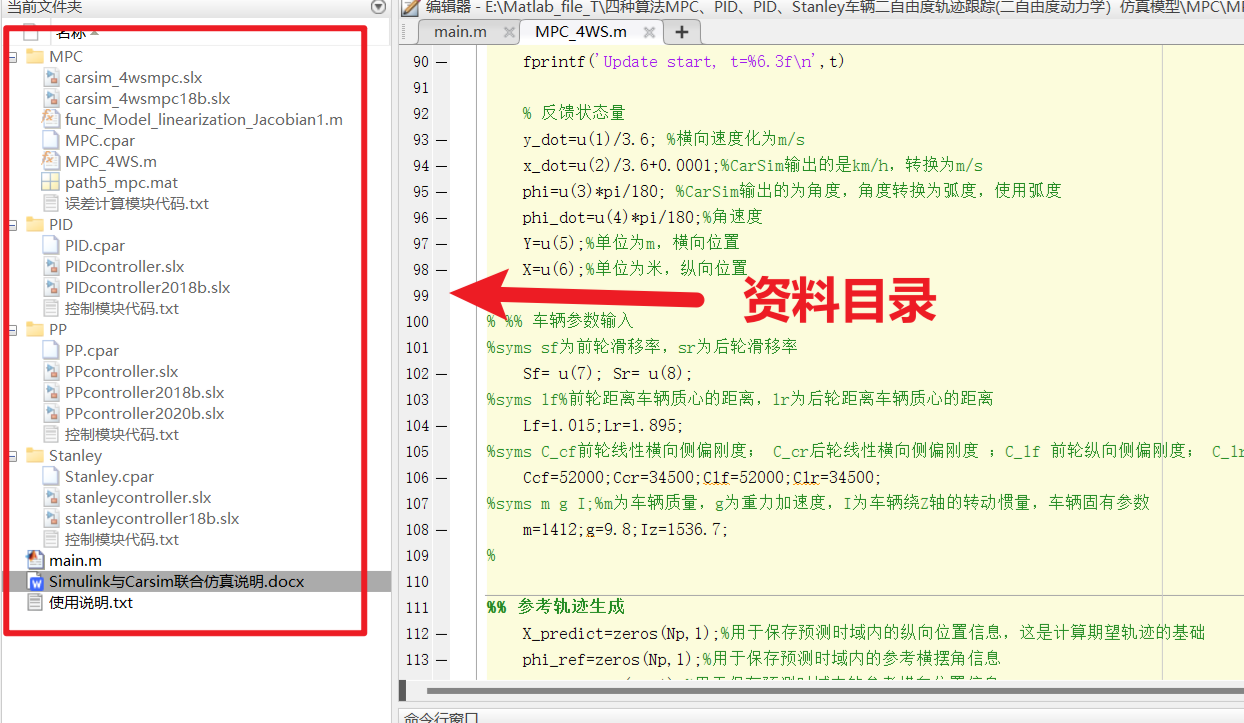
四种算法MPC、PID、PID、Stanley车辆二自由度轨迹跟踪(二自由度动力学)仿真模型
1、采用Carsim和Simulink联合仿真,带有联合运行说明文档
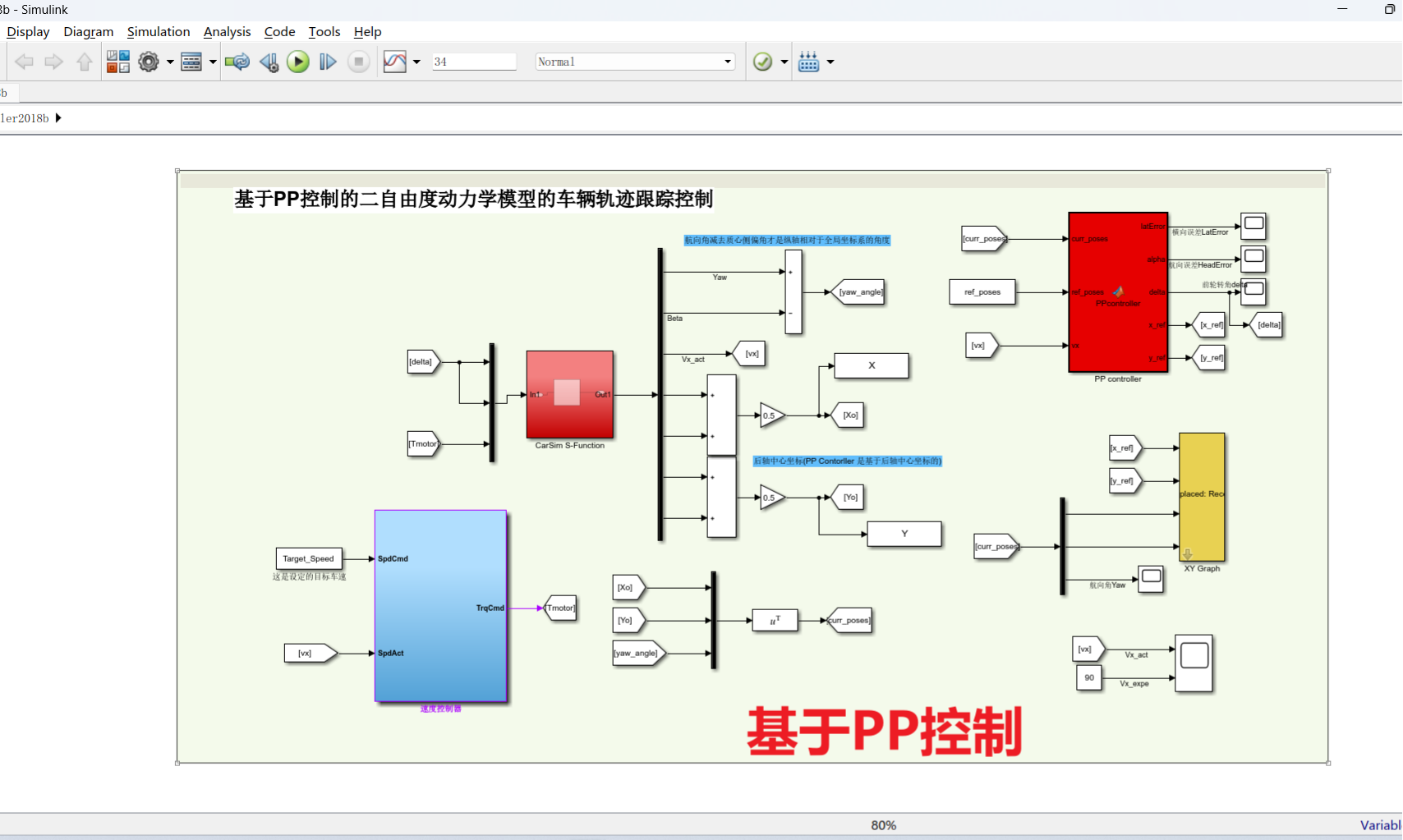
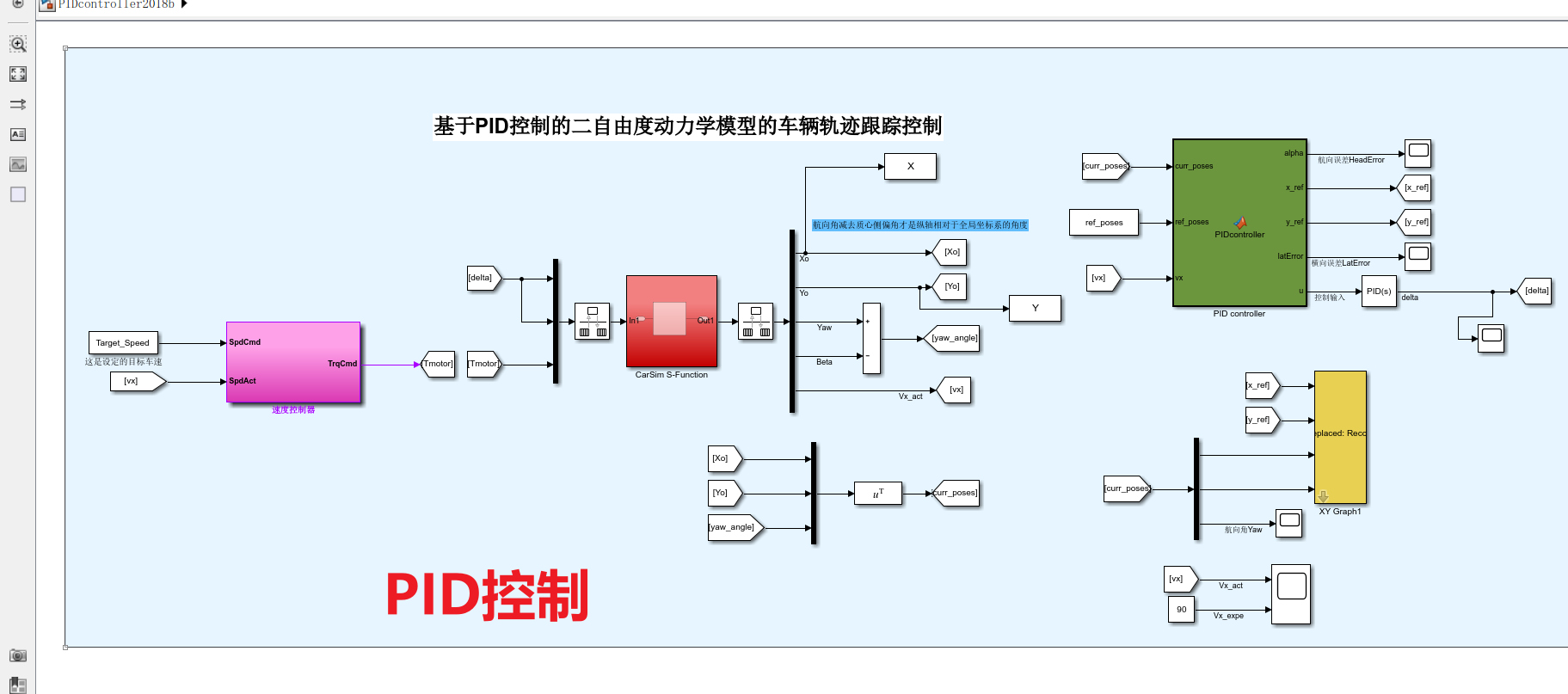
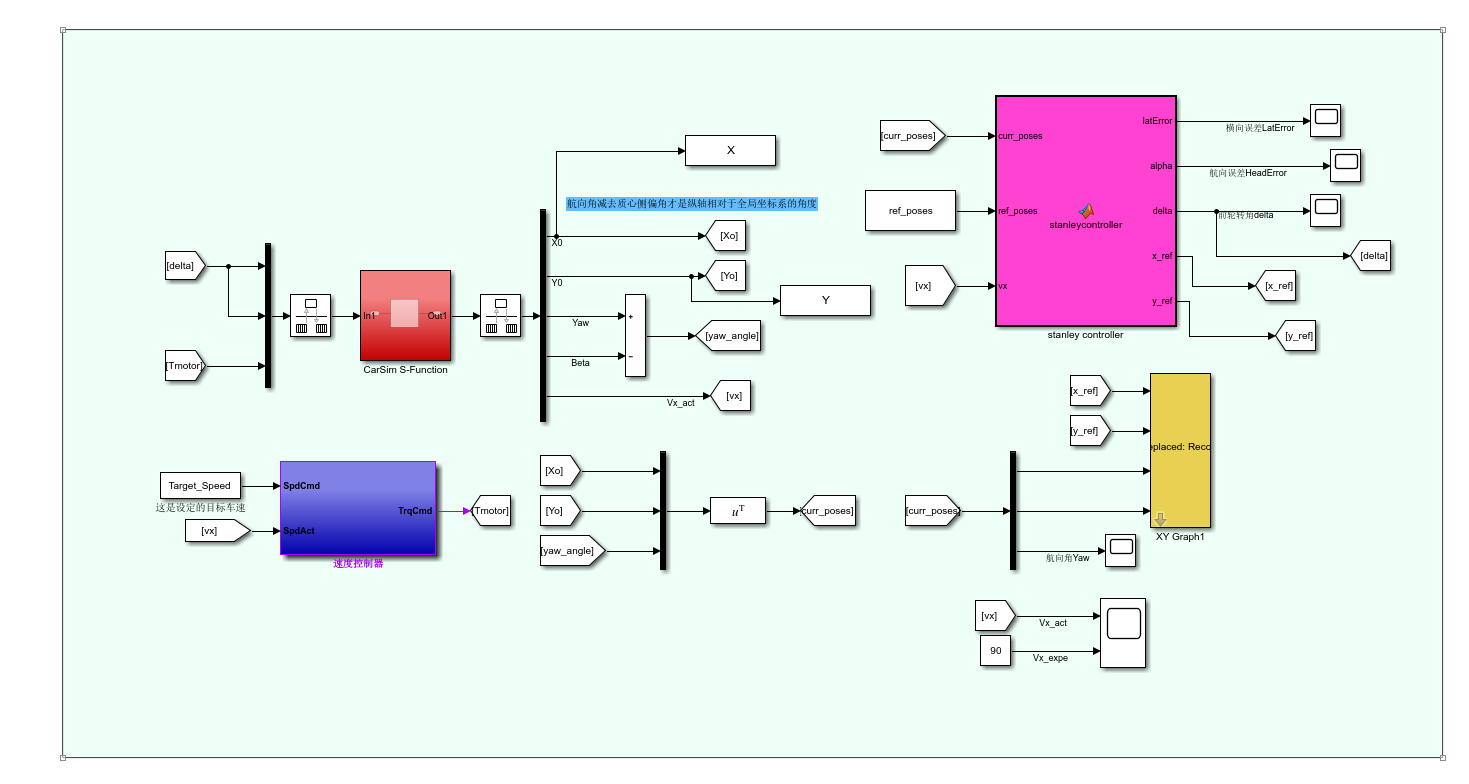
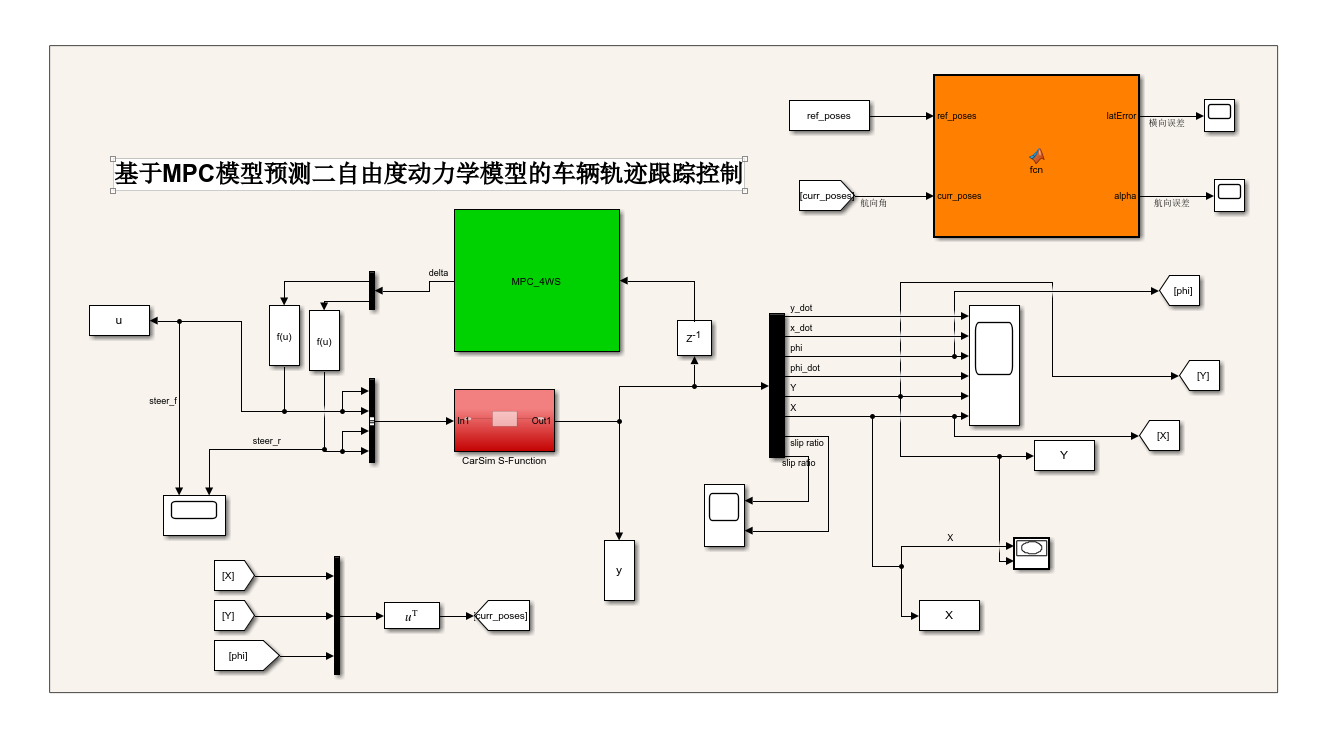
2、基于二自由度动力学模型的车辆轨迹跟踪控制,横向控制。
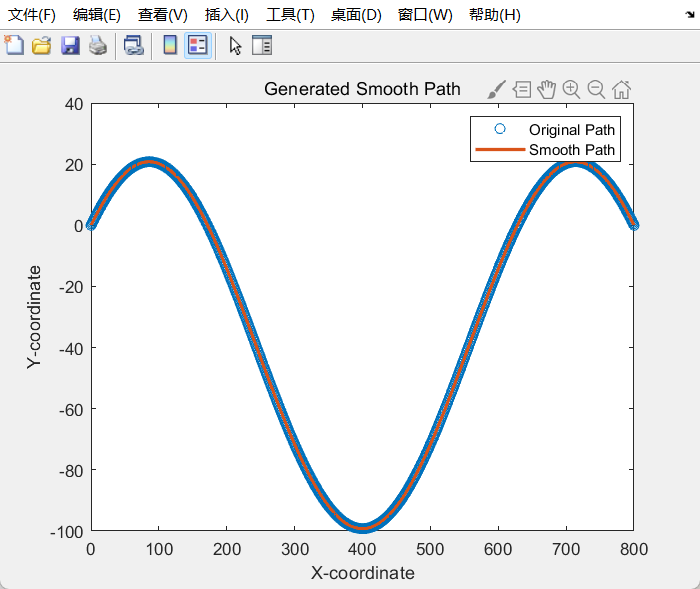
3、四种控制算法,均采用了相同的轨迹:
①MPC模型预测控制
②PID控制
③PP控制
④Stanley
4、仿真结果输出横向误差+航向误差
💰直接付款,即可下载完整资料!🔍资料内含文案描述的所有内容,就是这么全面!🔐请你看资料是否符合自己,确认再下单,因为资料是虚拟产品哦!🙋♀如果你遇到了任何运行或报错问题,请随时联系我哦!