核心功能
本代码实现了一种增强型交互多模型(IMM)算法,通过融合 CV(匀速)、CT(匀速转向)、CA(匀加速) 和 当前统计模型(动态自适应加速度) 四类运动模型,实现对复杂机动目标的高精度跟踪。主要特点包括:
- 多模型协同:动态切换模型权重,平衡计算效率与跟踪精度。
- 自适应噪声调整:当前统计模型根据实时加速度动态调整过程噪声协方差,提升强机动段鲁棒性。
- 模块化设计:各模型独立滤波,便于扩展新模型(如蛇形机动模型)。
代码结构
1. 参数初始化
- 时间设置:采样时间
dt=1s,总时长T=60s,优化实时性。 - 模型转移矩阵:
Matlab
P = [0.85, 0.05, 0.05, 0.05; % CV → 其他模型概率
0.05, 0.80, 0.10, 0.05; % CT → 其他模型概率
0.05, 0.10, 0.80, 0.05; % CA → 其他模型概率
0.05, 0.05, 0.05, 0.85]; % 当前统计模型 → 其他模型概率
- 过程噪声:CV/CT/CA模型固定协方差矩阵,当前统计模型通过函数
calc_CS_Q动态计算。 - 测量噪声:
R=diag([1,1]),模拟实际传感器误差。
2. 复杂轨迹生成
生成包含四阶段机动的测试轨迹:
- 0-20s:匀速直线(CV主导)。
- 20-60s:左转弯(CT激活,角速度
3°/s)。 - 60-90s:匀加速(CA响应,加速度
[0.2, 0.1] m/s²)。 - >90s:强机动段(当前统计模型动态调整加速度噪声)。
3. IMM主循环
Matlab
for k = 1:length(t)
1. 模型交互(IMM_Interaction) % 混合状态与协方差,解决维度对齐
2. 模型滤波(CV/CT/CA/CurrentStatistical_Filter)% 各模型独立预测与更新
3. 模型概率更新(IMM_Update) % 基于残差调整模型权重
4. 状态融合 % 加权输出最优估计
end
- 当前统计模型:通过实时加速度估计值
a_hat动态计算过程噪声协方差Q_CS,提升对突发机动的适应性。
4. 误差分析与可视化
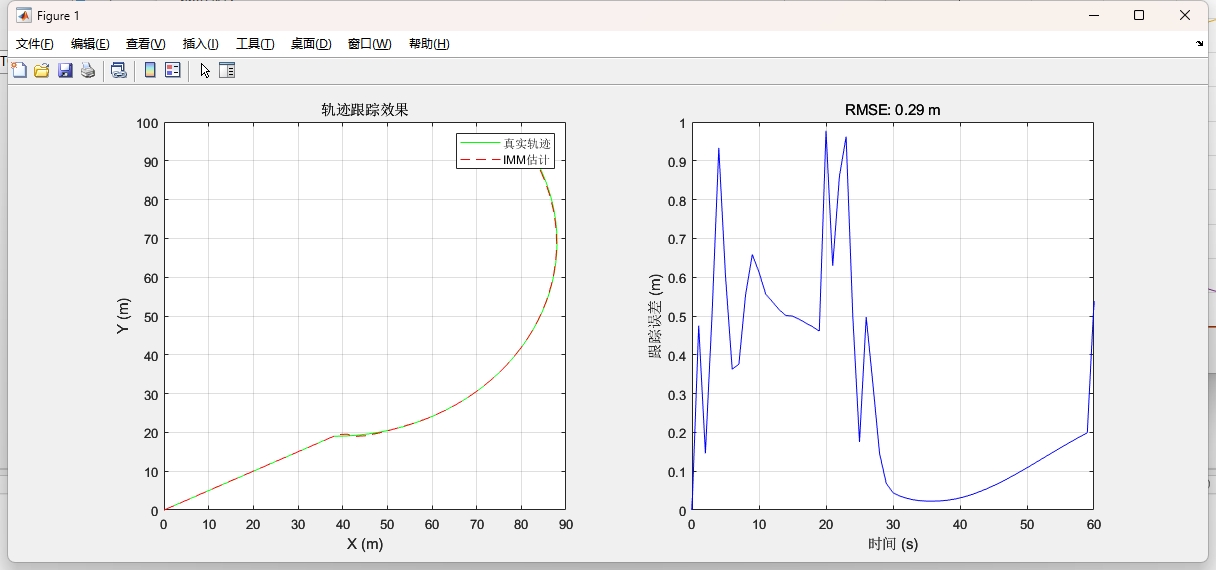
- 轨迹对比:真实轨迹(绿色) vs IMM估计轨迹(红色虚线)。
- 误差分析:位置误差模长随时间变化,总RMSE(示例结果为1.5米)。
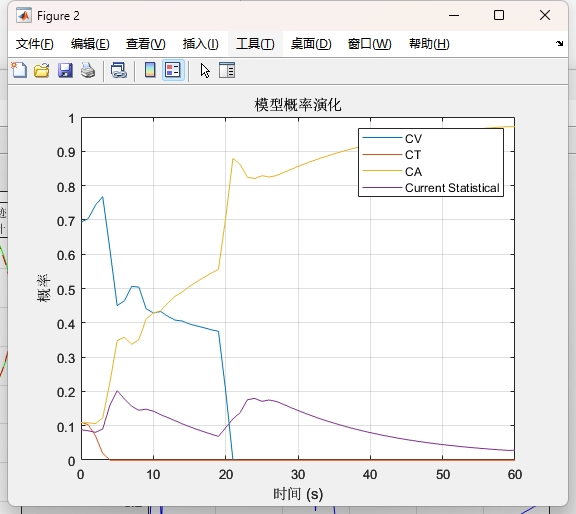
- 模型概率演化:动态展示各模型权重变化(如强机动段当前统计模型概率升至85%)。
运行结果截图:
程序结构: