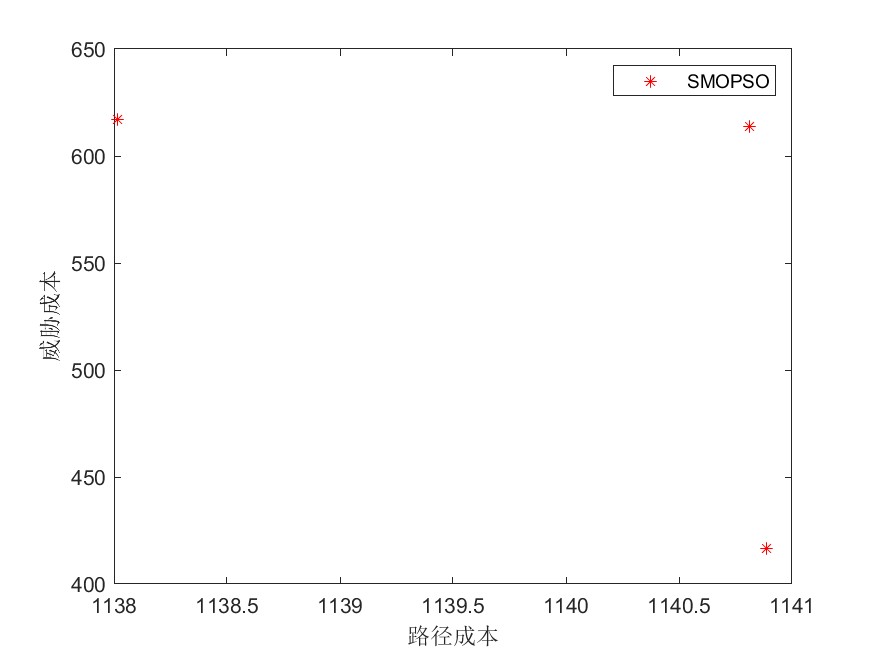
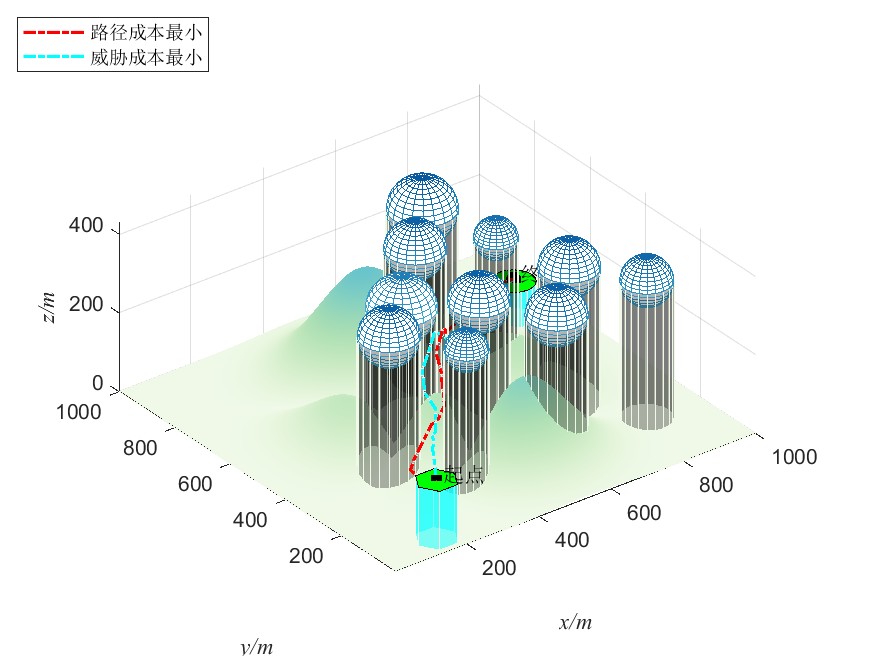
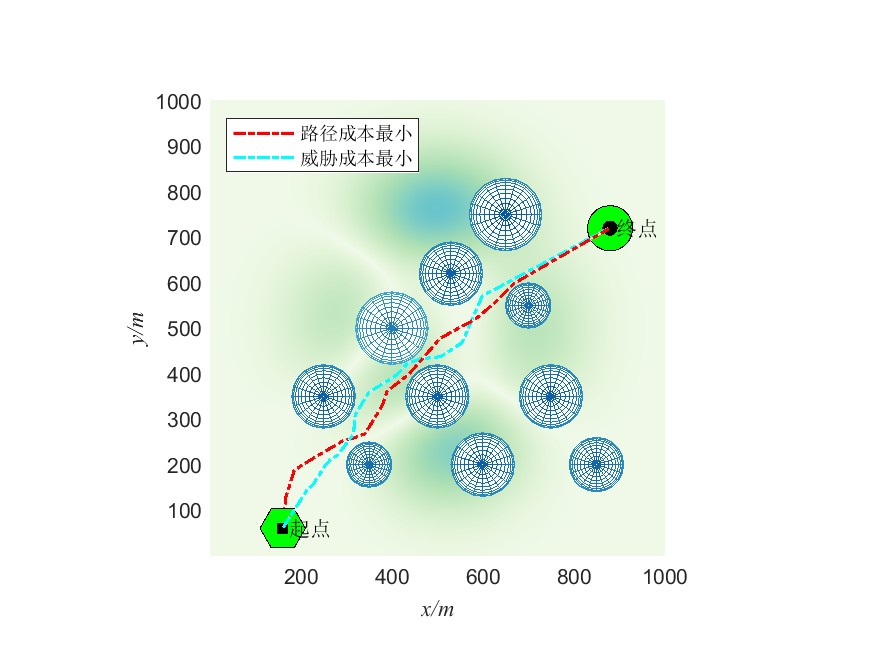
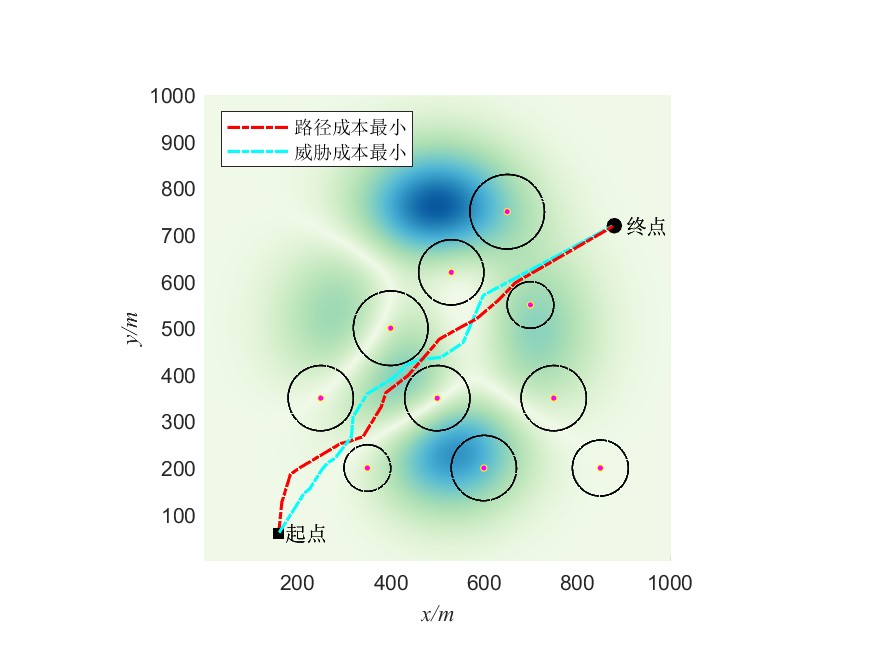
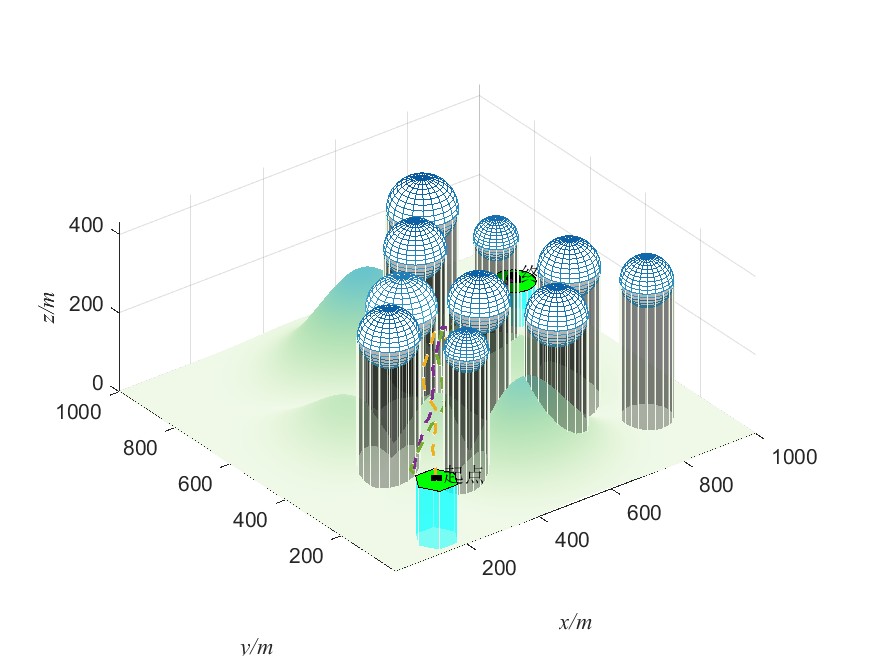
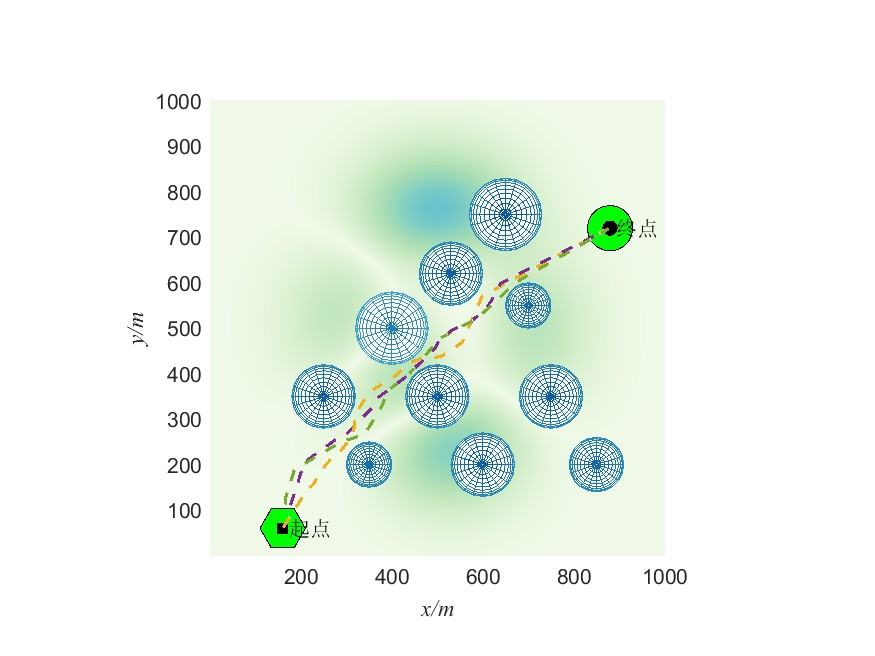
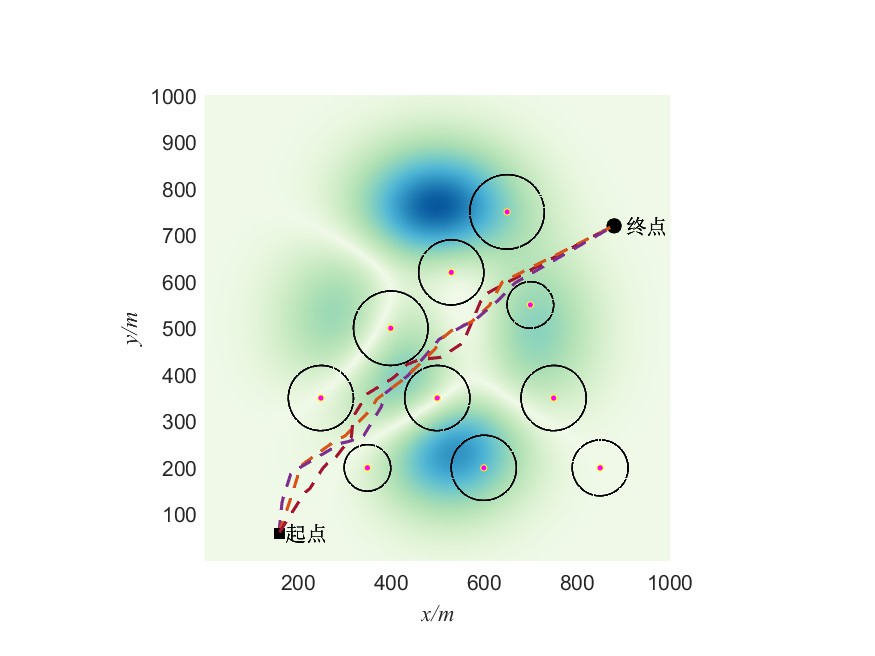
基于自组织的多目标粒子群优化算法(SMOPSO)求解无人机三维路径规划(MATLAB代码)
作品简介
一、详细介绍
基于自组织的多目标粒子群优化算法(SMOPSO)求解无人机三维路径规划(MATLAB代码)-CSDN博客
二、完整MATLAB代码
创作时间: