具体介绍参考:
包括工作空间下src和大作业word报告,可以购买后直接提交
ros是noetic版本,安装ros几个相关导航包:
sudo apt-get install ros-noetic-amcl
sudo apt-get install ros-noetic-gmapping
sudo apt-get install ros-noetic-navigation
使用方法:把src放入已有的或者新建的工作空间下
进入工作空间catkin_make成功编译后
1)启动gazebo仿真环境
roslaunch nav_amcl gazebo.launch
2)启动导航相关的launch文件
roslaunch nav_amcl nav.launch
3)通过Rviz工具栏的 2D Nav Goal设置目的地实现导航
最终效果:
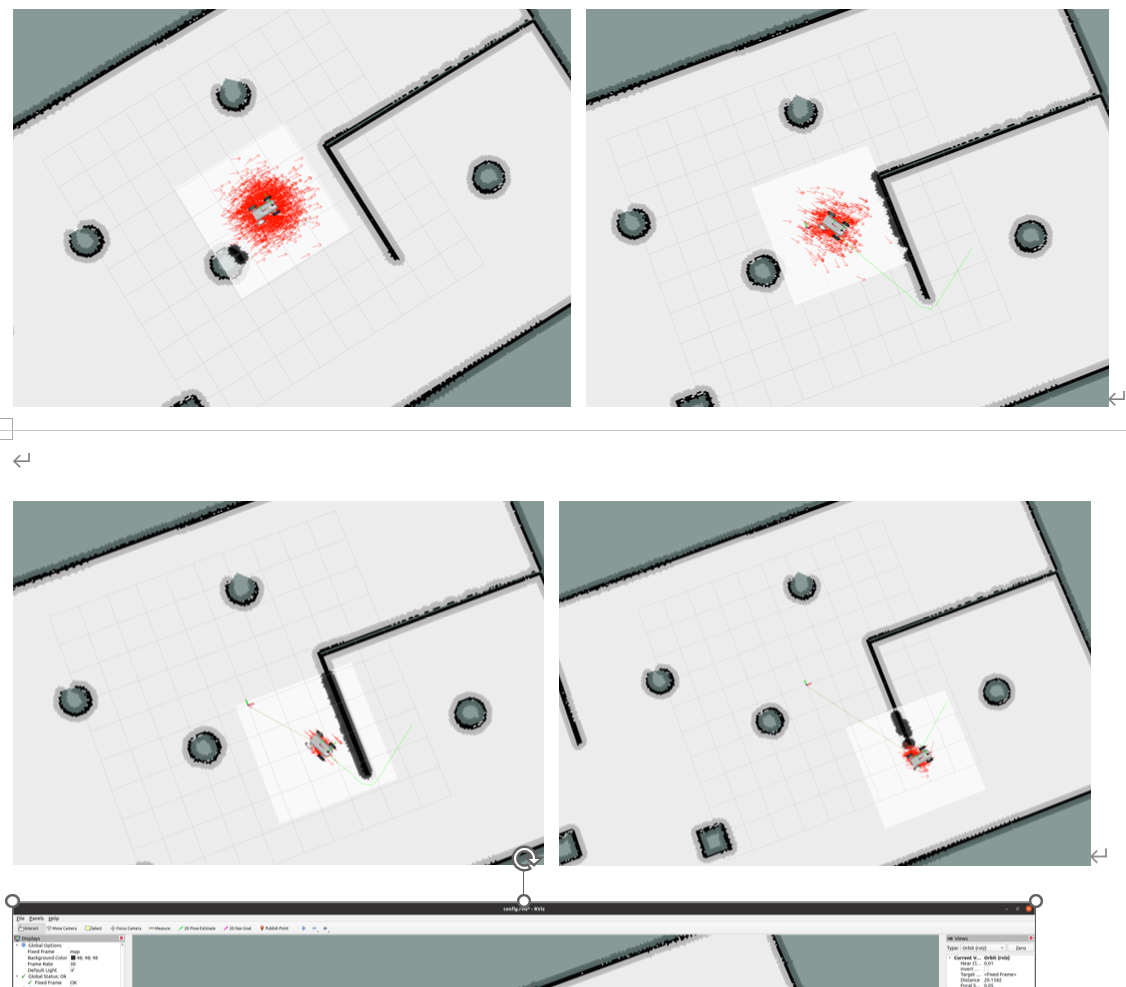
小车头部绿线为全局路径规划,红线为本地路径规划。
小车可以做到自动避障。
导航过程中可以看到,红色箭头越来越密集,说明当前机器人处于此位置的概率越高,定位越来越准确。