详细介绍
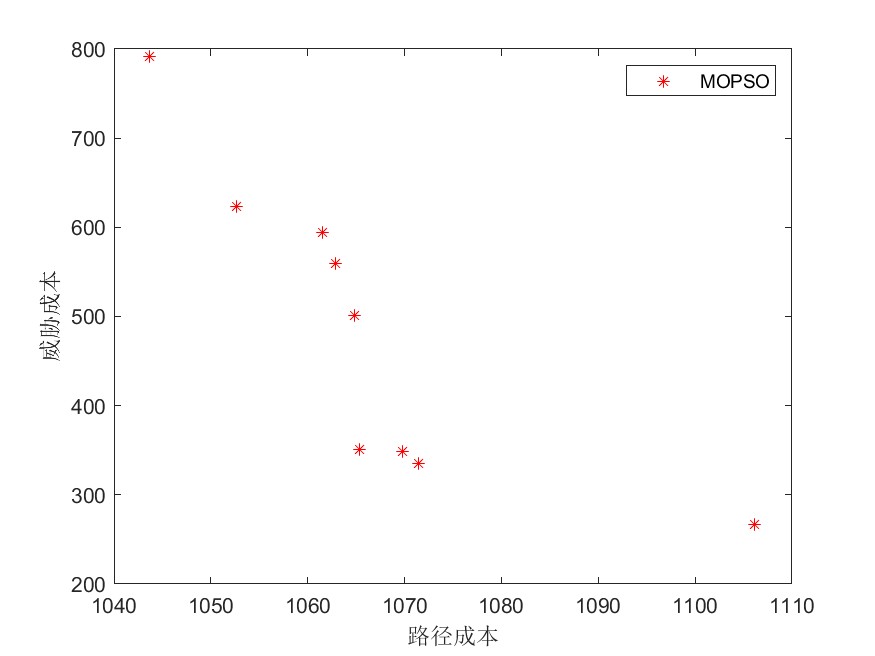
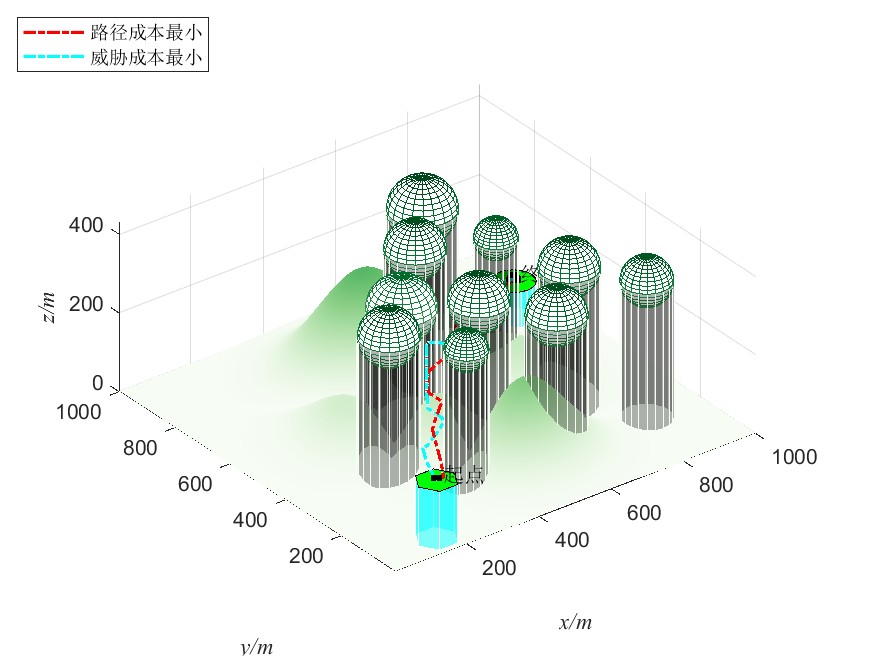
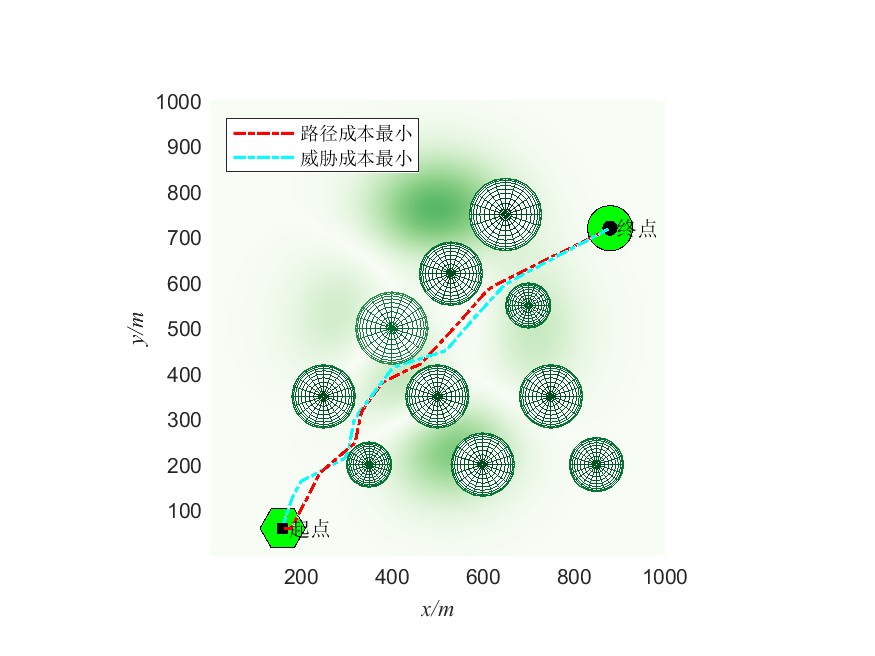
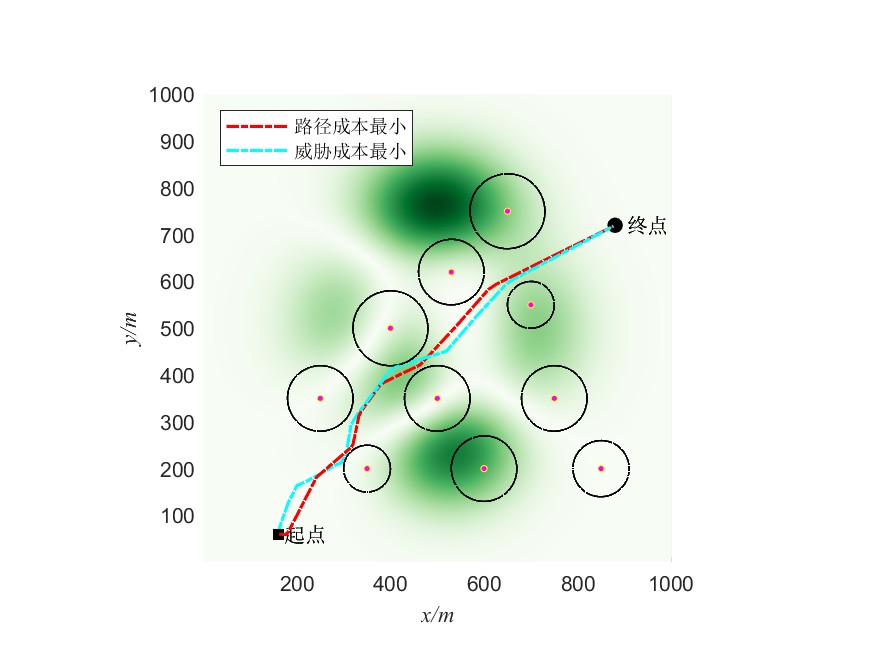
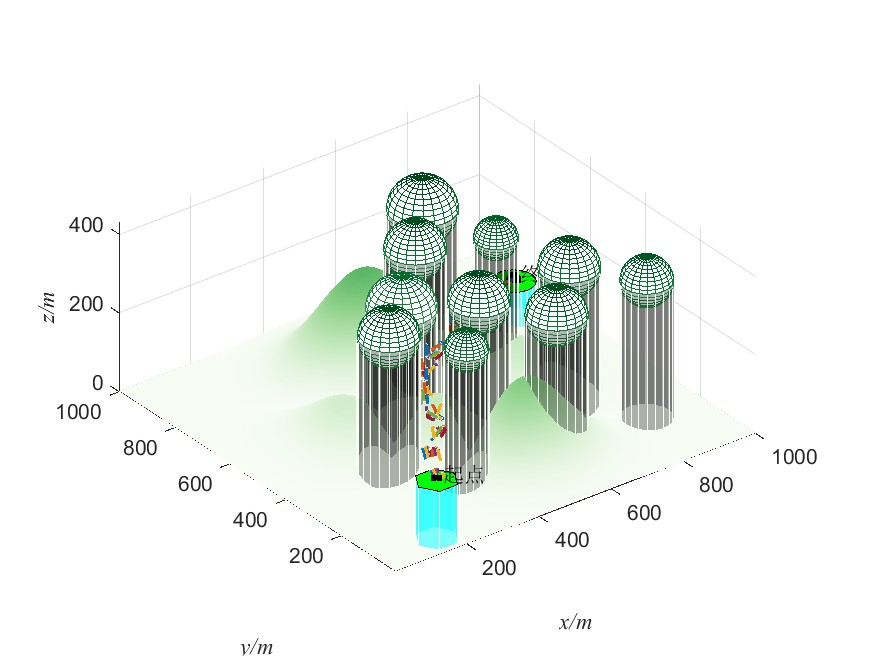
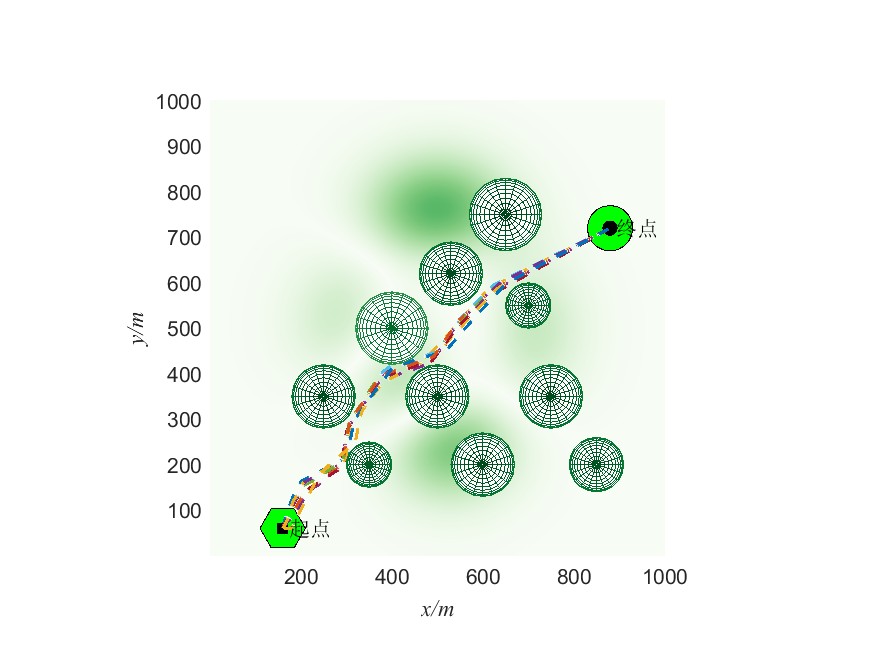
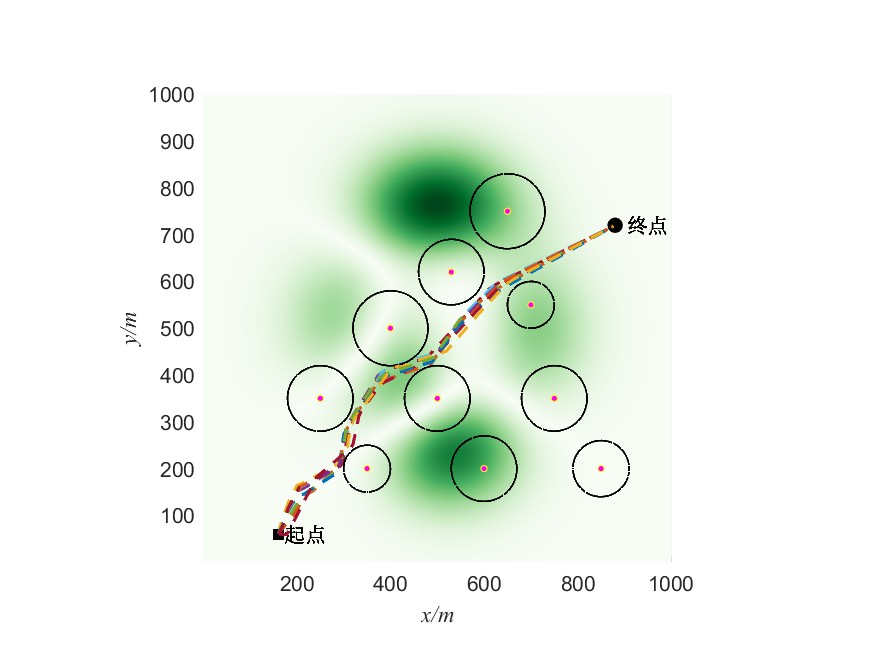
多目标应用:多目标粒子群优化(Multi-objective Particle Swarm Optimization, MOPSO)算法求解无人机三维路径规划(MATLAB代码)-CSDN博客
完整MATLAB代码

详细介绍
多目标应用:多目标粒子群优化(Multi-objective Particle Swarm Optimization, MOPSO)算法求解无人机三维路径规划(MATLAB代码)-CSDN博客
完整MATLAB代码