包含仿真操作视频和参考文献
1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
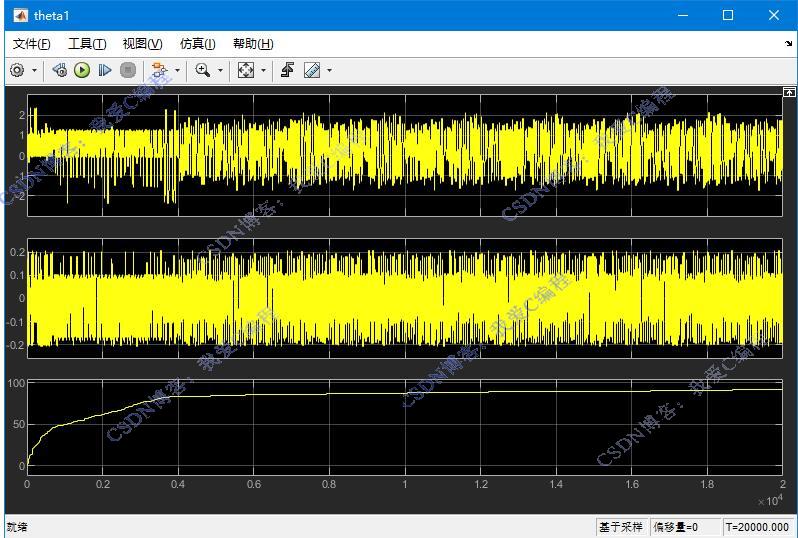
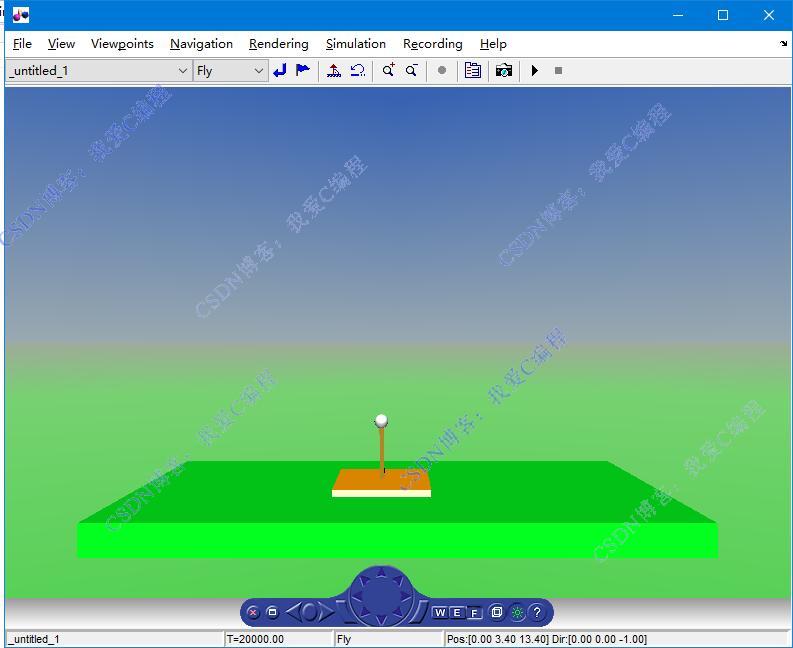
3.部分仿真截图
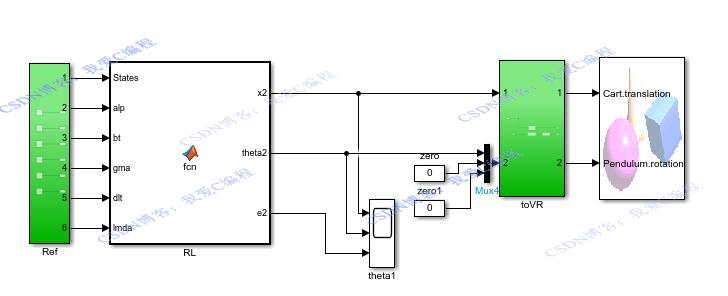
4.内容简介
基于强化学习的倒立摆平衡车控制系统是一个典型的动态系统控制问题,它通过不断的学习和决策过程,使倒立摆维持在垂直平衡位置,即使受到外力干扰或系统内部噪声影响。强化学习在此类问题中的应用,展示了其在解决复杂控制问题中的强大潜力。