1.软件版本
matlab2022a
2.运行方法
使用matlab2022a或者高版本仿真,运行文件夹中的tops.m或者main.m。运行时注意matlab左侧的当前文件夹窗口必须是当前工程所在路径。具体操作观看提供的程序操作视频跟着操作。视频播放使用windows media player播放。
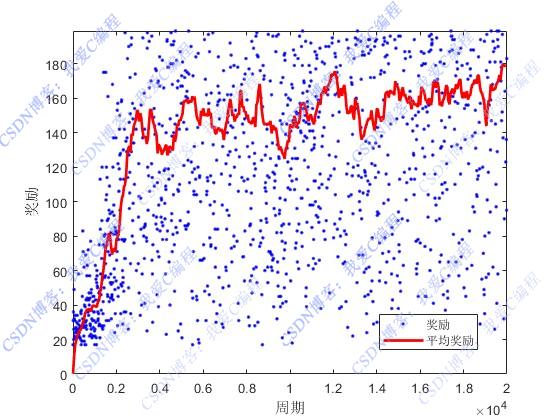
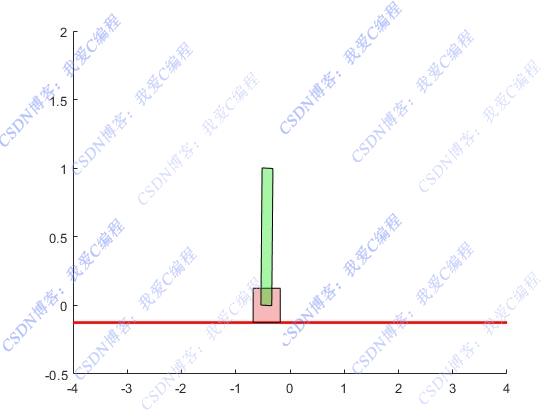
3.部分仿真截图
4.内容简介
基于Q-learning的强化学习方法应用于小车倒立摆控制系统,是通过让智能体(即控制小车的算法)在与环境的交互过程中学习到最优的控制策略,以保持倒立摆在不稳定平衡状态下的直立。Q-learning作为一种无模型的强化学习算法,特别适合解决这类动态环境下的决策问题。