一、部分代码
close all
clear
clc
rng('default');
%% 载入数据
data.S=[50,950,12]; %起点位置 横坐标与纵坐标需为50的倍数
data.E=[950,50,1]; %终点点位置 横坐标与纵坐标需为50的倍数
data.Obstacle=xlsread('data1.xls');
data.numObstacles=length(data.Obstacle(:,1));
%% 画图
figure
hold on
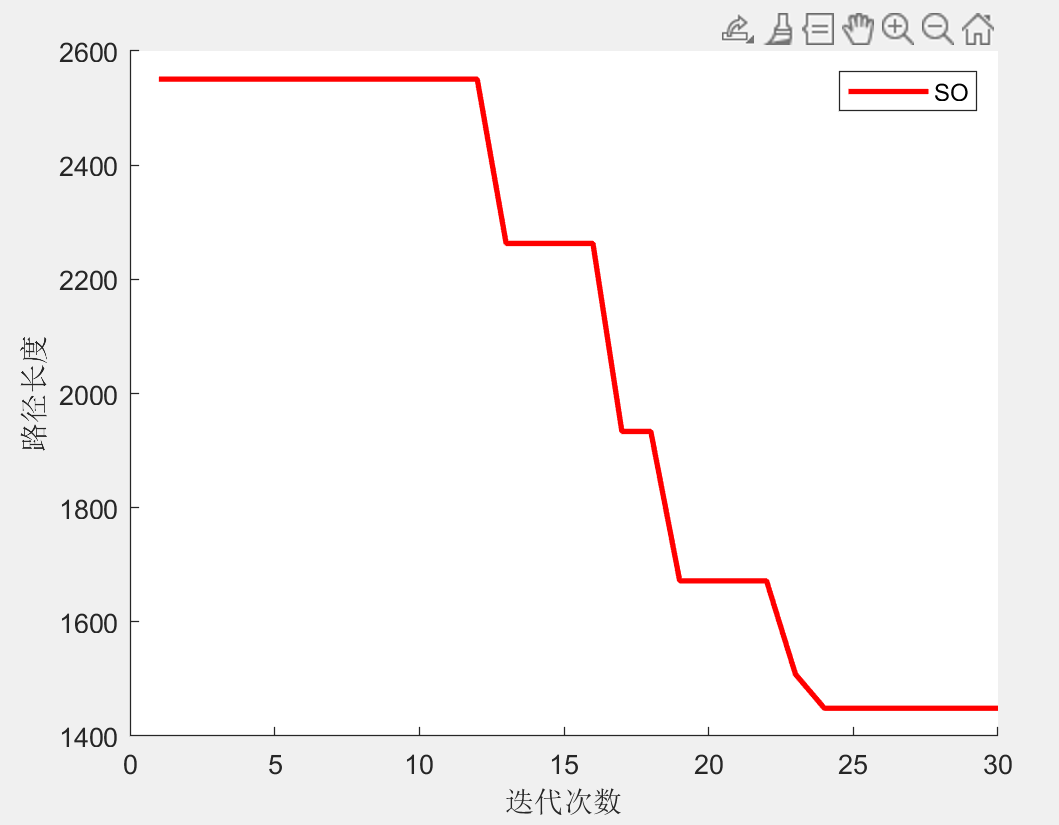
plot(curve,'r','LineWidth',2)
xlabel('迭代次数')
ylabel('路径长度')
legend(str);
[~,result]=fobj(Best_pos);
drawPc(result,option,data,str)
result.path(:,1)=result.path(:,1).*data.unit(1);
result.path(:,2)=result.path(:,2).*data.unit(2);
result.path(:,3)=result.path(:,3).*data.unit(3);
%% 显示路径信息
fprintf("路径坐标:\n");
display(result.path)
fprintf("路径长度:%f\n",result.fit);
二、部分结果


路径坐标:
50 950 12
50 900 12
100 850 13
150 800 12
200 750 11
250 750 11
300 750 11
350 700 11
400 700 11
450 650 10
500 600 10
500 550 9
500 500 8
500 450 8
500 400 7
500 350 7
550 300 6
600 300 5
650 300 4
700 250 3
750 200 3
800 150 3
850 100 2
900 100 2
950 50 1
路径长度:1448.634698
三、完整MATLAB代码