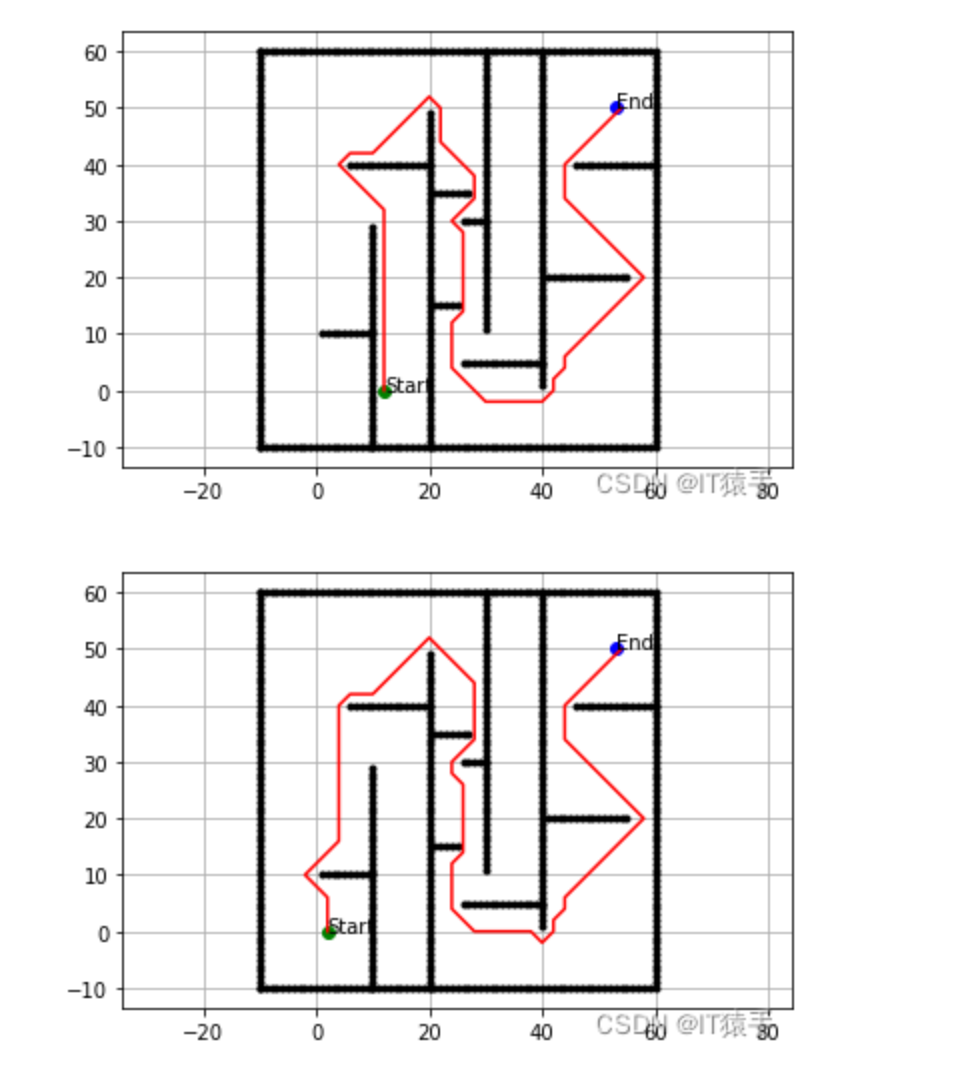
机器人路径规划:基于双向A*算法(bidirectional a star)的机器人路径规划(提供Python代码)
作品简介
机器人路径规划:基于双向A*算法(bidirectional a star)的机器人路径规划(提供Python代码)-CSDN博客
创作时间: