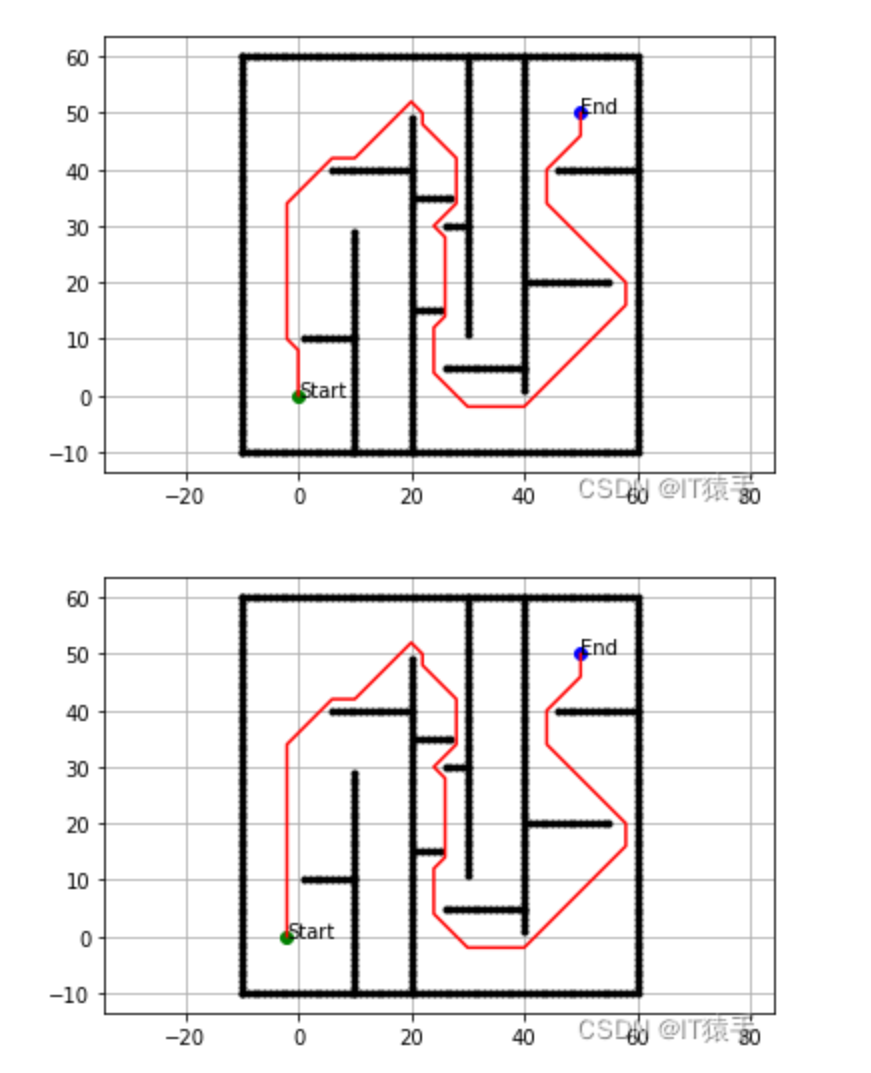
作品简介 机器人路径规划:基于双向广度优先搜索(Bidirectional Breadth-First grid planning)算法的机器人路径规划(提供Python代码)-CSDN博客 创作时间: